モリカトロン株式会社運営「エンターテインメント×AI」の最新情報をお届けするサイトです。
- TAG LIST
- CGCGへの扉安藤幸央生成AI月刊エンタメAIニュース機械学習河合律子ディープラーニング吉本幸記OpenAIGAN音楽NVIDIAChatGPTGoogle強化学習三宅陽一郎森川幸人グーグルStable Diffusionニューラルネットワーク大規模言語モデルLLMシナリオDeepMind人工知能学会モリカトロンマイクロソフトQAAIと倫理GPT-3自然言語処理Facebook大内孝子倫理映画著作権ルールベースアートゲームプレイAIキャラクターAIスクウェア・エニックス敵対的生成ネットワークSIGGRAPHモリカトロンAIラボインタビューNPC画像生成NFTMinecraftロボットDALL-E2音楽生成AIプロシージャルMidjourneyデバッグファッションStyleGAN自動生成ディープフェイク遺伝的アルゴリズム画像生成AIゲームAIVFXAdobeテストプレイメタAIアニメーションテキスト画像生成深層学習CEDEC2019MicrosoftデジタルツインメタバースVR小説ボードゲームDALL-ECLIPtoioビヘイビア・ツリーマンガCEDEC2021CEDEC2020作曲不完全情報ゲームロボティクスナビゲーションAIマインクラフト畳み込みニューラルネットワークスポーツエージェントGDC 2021GPT-4手塚治虫マルチモーダル汎用人工知能JSAI2022バーチャルヒューマンNVIDIA OmniverseGDC 2019動画生成AIマルチエージェントCEDEC2022MetaAIアート3DCGStability AIメタデジタルヒューマン懐ゲーから辿るゲームAI技術史教育ジェネレーティブAIはこだて未来大学プロンプトRed Ram栗原聡CNNNeRFDALL-E 3BERTMicrosoft AzureUnityOmniverseJSAI2023ELSI鴫原盛之HTN階層型タスクネットワークソニー東京大学JSAI2020GTC20233DマーケティングTensorFlowインタビューブロックチェーンCMイベントレポートアストロノーカ模倣学習対話型エージェントAmazonトレーディングカードメディアアートDQN高橋力斗合成音声水野勇太アバターブラック・ジャックUbisoftGenvid TechnologiesガイスターStyleGAN2電気通信大学稲葉通将ARアップルGTC2022GPT-3.5SoraSIGGRAPH ASIANetflixJSAI2021Bard研究シムピープル世界モデルMCS-AI動的連携モデルマーダーミステリーモーションキャプチャーアドベンチャーゲームTEZUKA2020CEDEC2023AGIテキスト生成インディーゲームElectronic Arts音声合成広告JSAI2024メタデータGDC Summerイーロン・マスクStable Diffusion XL森山和道キャリアeスポーツスタンフォード大学アーケードゲームテニスサイバーエージェント音声認識類家利直eSportsBLUE PROTOCOLシーマンaiboSIE大澤博隆SFプロトタイピングモリカトロン開発者インタビュー宮本茂則チャットボットGeminiワークショップEpic GamesAIロボ「迷キュー」に挑戦AWS徳井直生村井源クラウド斎藤由多加AlphaZeroTransformerGPT-2rinnaAIりんなカメラ環世界中島秀之PaLMGitHub Copilot哲学ベリサーブPlayable!ハリウッド理化学研究所Gen-1SFテキスト画像生成AI松尾豊AIQVE ONEデータマイニング現代アートDARPAドローンシムシティゲームエンジンImagenZorkバイアスASBSぱいどんAI美空ひばり手塚眞バンダイナムコ研究所スパーシャルAIELYZANEDOFSM-DNNMindAgentLEFT 4 DEAD通しプレイ論文OpenAI Five本間翔太馬淵浩希CygamesAudio2Faceピクサープラチナエッグイーサリアム効果音ボエダ・ゴティエビッグデータ中嶋謙互Amadeus Codeデータ分析MILENVIDIA ACEナラティブNVIDIA RivaOmniverse ReplicatorWCCFレコメンドシステムNVIDIA DRIVE SimWORLD CLUB Champion FootballNVIDIA Isaac Simセガ柏田知大軍事田邊雅彦Google I/Oトレカ慶應義塾大学Max CooperGPTDisneyFireflyPyTorch京都芸術大学ChatGPT4モンテカルロ木探索眞鍋和子バンダイナムコスタジオヒストリアAI Frog Interactive新清士田中章愛銭起揚齊藤陽介コナミデジタルエンタテインメント成沢理恵お知らせMagic Leap OneTencentサッカーバスケットボールTikTokSuno AItext-to-imageサルでもわかる人工知能text-to-3DVAEDreamFusionTEZUKA2023リップシンキングRNNUbisoft La Forge自動運転車知識表現ウォッチドッグス レギオンVTuberIGDA立教大学秋期GTC2022市場分析フォートナイトKLabどうぶつしょうぎRobloxジェイ・コウガミ音楽ストリーミングMIT野々下裕子Adobe MAXマシンラーニング5GMuZeroRival Peakがんばれ森川君2号pixivオムロン サイニックエックスGPTs対話エンジンポケモン3Dスキャン橋本敦史リトル・コンピュータ・ピープルCodexシーマン人工知能研究所コンピューティショナル・フォトグラフィーPreferred Networksゴブレット・ゴブラーズ絵画Open AI3D Gaussian SplattingMicrosoft DesignerイラストシミュレーションSoul Machines柿沼太一完全情報ゲームバーチャルキャラクター坂本洋典宮本道人釜屋憲彦ウェイポイントLLaMAパス検索Hugging Face対談藤澤仁生物学GTC 2022xAIApple Vision Pro画像認識SiemensストライキStyleCLIPDeNAVoyager長谷洋平GDC 2024クラウドコンピューティングmasumi toyotaIBM宮路洋一OpenSeaGDC 2022SNSTextWorldEarth-2AppleBingMagentaソフトバンクYouTube音声生成AIELYZA PencilScenarioSIGGRAPH2023AIピカソGTC2021AI素材.comCycleGANテンセントAndreessen HorowitzQA Tech Night松木晋祐NetHack下田純也桑野範久キャラクターモーションControlNet音源分離NBAフェイクニュースユニバーサルミュージックRPG法律Web3SIGGRAPH 2022レベルデザインDreamerV3AIボイスアクターUnreal Engine南カリフォルニア大学NVIDIA CanvasGPUALife人工生命オルタナティヴ・マシンサム・アルトマンサウンドスケープLaMDATRPGマジック:ザ・ギャザリングAI Dungeon介護ゲーム背景アパレル不気味の谷ナビゲーションメッシュデザイン写真高橋ミレイ深層強化学習松原仁松井俊浩武田英明フルコトELYZA DIGESTWWDCWWDC 2024建築西成活裕ハイブリッドアーキテクチャAI野々村真Apex LegendsELIZA群衆マネジメントライブポートレイトNinjaコンピュータRPGライブビジネスWonder StudioAdobe Max 2023GPT-4-turboアップルタウン物語新型コロナ土木佐藤恵助KELDIC周済涛BIMBing Chat大道麻由メロディ言語清田陽司インフラBing Image Creator物語構造分析ゲームTENTUPLAYサイバネティックス慶応義塾大学MARVEL Future FightAstro人工知能史Amazon BedrockAssistant with Bard渡邉謙吾タイムラプスEgo4DAI哲学マップThe Arcadeここ掘れ!プッカバスキア星新一X.AISearch Generative Experienceくまうた日経イノベーション・ラボStyleGAN-XLX Corp.Dynalang濱田直希敵対的強化学習StyleGAN3TwitterVLE-CE大柳裕⼠階層型強化学習GOSU Data LabGANimatorXホールディングス加納基晴WANNGOSU Voice AssistantVoLux-GANMagiAI Actソニー・インタラクティブエンタテインメント竹内将SenpAI.GGProjected GANEU研究開発事例MobalyticsSelf-Distilled StyleGANSDXLArs Electronica赤羽進亮ニューラルレンダリングRTFKTAI規制遊戯王岡島学AWS SagemakerPLATONIKE欧州委員会UDI(Universal Duel Interface)映像セリア・ホデント形態素解析frame.ioClone X欧州議会第一工科大学UXAWS LambdaFoodly村上隆欧州理事会佐竹空良誤字検出MusicLM小林篤史認知科学中川友紀子Digital MarkAudioLM九州大学ゲームデザインSentencePieceアールティSnapchatMusicCaps荻野宏実LUMINOUS ENGINEクリエイターコミュニティAudioCraft伊藤黎Luminous ProductionsBlenderBot 3バーチャルペットビヘイビアブランチパターン・ランゲージ竹村也哉Meta AINVIDIA NeMo ServiceMubertWPPちょまどマーク・ザッカーバーグヴァネッサ・ローザMubert RenderGeneral Computer Control(GCC)GOAPWACULVanessa A RosaGen-2CradleAdobe MAX 2021陶芸Runway AI Film Festival自動翻訳Play.htPreViz音声AIAIライティングLiDARCharacter-LLMOmniverse AvatarAIのべりすとPolycam復旦大学FPSQuillBotdeforumChat-Haruhi-Suzumiyaマルコフ決定過程NVIDIA MegatronCopysmith涼宮ハルヒNVIDIA MerlinJasperハーベストEmu VideoNVIDIA MetropolisForGamesNianticパラメータ設計ゲームマーケットペリドットバランス調整岡野翔太Dream Track協調フィルタリング郡山喜彦Music AI Tools人狼知能テキサス大学ジェフリー・ヒントンLyriaGoogle I/O 2023Yahoo!知恵袋AlphaDogfight TrialsAI Messenger VoicebotインタラクティブプロンプトAIエージェントシミュレーションOpenAI Codex武蔵野美術大学StarCraft IIHyperStyleBingAI石渡正人Future of Life InstituteRendering with Style手塚プロダクションIntel林海象LAIKADisneyリサーチヴィトゲンシュタインPhotoshop古川善規RotomationGauGAN論理哲学論考Lightroom大規模再構成モデルGauGAN2CanvaLRMドラゴンクエストライバルズ画像言語表現モデルObjaverse不確定ゲームSIGGRAPH ASIA 2021PromptBaseBOOTHMVImgNetDota 2ディズニーリサーチpixivFANBOXOne-2-3-45Mitsuba2バンダイナムコネクサス虎の穴3DガウシアンスプラッティングソーシャルゲームEmbeddingワイツマン科学研究所ユーザーレビューFantiaワンショット3D生成技術GTC2020CG衣装mimicとらのあなNVIDIA MAXINEVRファッションBaidu集英社FGDC淡路滋ビデオ会議ArtflowERNIE-ViLG少年ジャンプ+Future Game Development ConferenceグリムノーツEponym古文書ComicCopilot佐々木瞬ゴティエ・ボエダ音声クローニング凸版印刷コミコパGautier Boeda階層的クラスタリングGopherAI-OCRゲームマスター画像判定Inowrld AIJulius鑑定ラベル付けMODAniqueTPRGOxia PalusGhostwriter中村太一バーチャル・ヒューマン・エージェントtoio SDK for UnityArt RecognitionSkyrimエグゼリオクーガー実況パワフルサッカースカイリムCopilot石井敦NHC 2021桃太郎電鉄RPGツクールMZComfyUI茂谷保伯池田利夫桃鉄ChatGPT_APIMZserial experiments lainGDMC新刊案内パワサカダンジョンズ&ドラゴンズAI lainマーベル・シネマティック・ユニバースOracle RPGPCGMITメディアラボMCU岩倉宏介深津貴之PCGRLアベンジャーズPPOxVASynthDungeons&Dragonsマジック・リープDigital DomainMachine Learning Project CanvasLaser-NVビートルズMagendaMasquerade2.0国立情報学研究所ザ・ビートルズ: Get BackノンファンジブルトークンDDSPフェイシャルキャプチャー石川冬樹MERFDemucsスパコンAlibaba音楽編集ソフト里井大輝KaggleスーパーコンピュータVQRFAdobe Audition山田暉松岡 聡nvdiffreciZotopeAssassin’s Creed OriginsAI会話ジェネレーターTSUBAME 1.0NeRFMeshingRX10Sea of ThievesTSUBAME 2.0LERFMoisesGEMS COMPANYmonoAI technologyLSTMABCIマスタリングモリカトロンAIソリューション富岳レベルファイブ初音ミクOculusコード生成AISociety 5.0リアム・ギャラガー転移学習テストAlphaCode夏の電脳甲子園グライムスKaKa CreationBaldur's Gate 3Codeforces座談会BoomyVOICEVOXCandy Crush Saga自己増強型AIジョン・レジェンドGenie AISIGGRAPH ASIA 2020COLMAPザ・ウィークエンドSIGGRAPH Asia 2023ADOPNVIDIA GET3DドレイクC·ASEデバッギングBigGANGANverse3DFLAREMaterialGANダンスグランツーリスモSPORTAI絵師エッジワークスMagicAnimateReBeLグランツーリスモ・ソフィーUGC日本音楽作家団体協議会Animate AnyoneGTソフィーPGCFCAインテリジェントコンピュータ研究所VolvoFIAグランツーリスモチャンピオンシップVoiceboxアリババNovelAIさくらインターネットDreaMovingRival PrakDGX A100NovelAI DiffusionVISCUITぷよぷよScratchユービーアイソフトWebcam VTuberモーションデータスクラッチ星新一賞大阪公立大学ビスケット北尾まどかHALOポーズ推定TCGプログラミング教育将棋メタルギアソリッドVメッシュ生成FSMメルセデス・ベンツQRコードVALL-EMagic Leap囲碁Deepdub.aiナップサック問題Live NationEpyllionデンソーAUDIOGEN汎用言語モデルWeb3.0マシュー・ボールデンソーウェーブEvoke MusicAIOpsムーアの法則原昌宏AutoFoleySpotifyスマートコントラクト日本機械学会Colourlab.AiReplica Studioロボティクス・メカトロニクス講演会ディズニーamuseChitrakarQosmoAdobe MAX 2022トヨタ自動車Largo.ai巡回セールスマン問題かんばん方式Cinelyticジョルダン曲線メディアAdobe ResearchTaskade政治Galacticaプロット生成Pika.artクラウドゲーミングAI Filmmaking Assistant和田洋一リアリティ番組映像解析FastGANStadiaジョンソン裕子セキュリティ4コママンガAI ScreenwriterMILEsNightCafe東芝デジタルソリューションズ芥川賞インタラクティブ・ストリーミングLuis RuizSATLYS 映像解析AI文学インタラクティブ・メディア恋愛PFN 3D ScanElevenLabsタップル東京工業大学HeyGenAbema TVLudo博報堂After EffectsNECラップPFN 4D Scan絵本木村屋SIGGRAPH 2019ArtEmisZ世代DreamUp出版GPT StoreAIラッパーシステムDeviantArtAmmaar Reshi生成AIチェッカーWaifu DiffusionStoriesユーザーローカルGROVERプラスリンクス ~キミと繋がる想い~元素法典StoryBird九段理江FAIRSTCNovel AIVersed東京都同情塔チート検出Style Transfer ConversationProlificDreamerオンラインカジノRCPUnity Sentis4Dオブジェクト生成モデルRealFlowRinna Character PlatformUnity MuseAlign Your GaussiansiPhoneCALACaleb WardAYGDeep Fluids宮田龍MAV3DMeInGameAmelia清河幸子ファーウェイAIGraphブレイン・コンピュータ・インタフェース西中美和4D Gaussian SplattingBCIGateboxアフォーダンス安野貴博4D-GSLearning from VideoANIMAKPaLM-SayCan斧田小夜Glaze予期知能逢妻ヒカリWebGlazeセコムLLaMA 2NightShadeユクスキュルバーチャル警備システムCode as PoliciesSpawningカント損保ジャパンCaPHave I Been Trained?CM3leonFortnite上原利之Stable DoodleUnreal Editor For FortniteドラゴンクエストエージェントアーキテクチャアッパーグラウンドコリジョンチェックT2I-AdapterXRPAIROCTOPATH TRAVELER西木康智VolumetricsOCTOPATH TRAVELER 大陸の覇者山口情報芸術センター[YCAM]AIワールドジェネレーターアルスエレクトロニカ2019品質保証YCAM日本マネジメント総合研究所Rosebud AI GamemakerStyleRigAutodeskアンラーニング・ランゲージLayer逆転オセロニアBentley Systemsカイル・マクドナルドLily Hughes-RobinsonCharisma.aiワールドシミュレーターローレン・リー・マッカーシーColossal Cave Adventure奥村エルネスト純いただきストリートH100鎖国[Walled Garden]プロジェクトAdventureGPT調査齋藤精一大森田不可止COBOLSIGGRAPH ASIA 2022リリー・ヒューズ=ロビンソンMeta Quest高橋智隆DGX H100VToonifyBabyAGIIPロボユニザナックDGX SuperPODControlVAEGPT-3.5 Turbo泉幸典仁井谷正充変分オートエンコーダーカーリング強いAIロボコレ2019Instant NeRFフォトグラメトリウィンブルドン弱いAIartonomous回帰型ニューラルネットワークbitGANsDeepJoin戦術分析ぎゅわんぶらあ自己中心派Azure Machine LearningAzure OpenAI Serviceパフォーマンス測定Lumiere意思決定モデル脱出ゲームDeepLIoTUNetHybrid Reward Architectureコミュニティ管理DeepL WriteProFitXImageFXウロチョロスSuper PhoenixWatsonxMusicFXProject MalmoオンラインゲームAthleticaTextFX気候変動コーチングProject Paidiaシンギュラリティ北見工業大学KeyframerProject Lookoutマックス・プランク気象研究所レイ・カーツワイル北見カーリングホールWatch Forビョルン・スティーブンスヴァーナー・ヴィンジ画像解析Gemini 1.5気象モデルRunway ResearchじりつくんAI StudioLEFT ALIVE気象シミュレーションMake-A-VideoNTT SportictVertex AI長谷川誠ジミ・ヘンドリックス環境問題PhenakiAIカメラChat with RTXBaby Xカート・コバーンエコロジーDreamixSTADIUM TUBESlackロバート・ダウニー・Jr.エイミー・ワインハウスSDGsText-to-ImageモデルPixelllot S3Slack AIPokémon Battle Scopeダフト・パンクメモリスタAIスマートコーチポケットモンスターGlenn MarshallkanaeruThe Age of A.I.Story2Hallucination音声変換Latitude占いレコメンデーションJukeboxDreambooth行動ロジック生成AIVeap Japanヤン・ルカンConvaiEAPneoAIPerfusionNTTドコモSIFT福井千春DreamIconニューラル物理学EmemeDCGAN医療mign毛髪GenieMOBADANNCEメンタルケアstudiffuse荒牧英治汎用AIエージェント人事ハーバード大学Edgar Handy中ザワヒデキAIファッションウィーク研修デューク大学大屋雄裕インフルエンサー中川裕志Grok-1mynet.aiローグライクゲームAdreeseen HorowitzMixture-of-Experts東京理科大学NVIDIA Avatar Cloud EngineMoE人工音声NeurIPS 2021産業技術総合研究所Replica StudiosClaude 3リザバーコンピューティングSmart NPCsClaude 3 Haikuプレイ動画ヒップホップ対話型AIモデルRoblox StudioClaude 3 Sonnet詩ソニーマーケティングPromethean AIClaude 3 Opusサイレント映画もじぱnote森永乳業環境音暗号通貨note AIアシスタントMusiioC2PAFUZZLEKetchupEndelゲーミフィケーションAlterationAI NewsTomo Kihara粒子群最適化法Art SelfiePlayfool進化差分法オープンワールドArt TransferSonar遊び群知能下川大樹AIFAPet PortraitsSonar+Dtsukurunウィル・ライト高津芳希P2EBlob Opera地方創生大石真史クリムトDolby Atmos吉田直樹BEiTStyleGAN-NADASonar Music Festival素材DETRライゾマティクスSIMASporeクリティックネットワーク真鍋大度OpenAI JapanデノイズUnity for Industryアクターネットワーク花井裕也Voice Engine画像処理DMLabRitchie HawtinCommand R+SentropyGLIDEControl SuiteErica SynthOracle Cloud InfrastructureCPUDiscordAvatarCLIPAtari 100kUfuk Barış MutluGoogle WorkspaceSynthetic DataAtari 200MJapanese InstructBLIP AlphaUdioCALMYann LeCun日本新聞協会立命館大学プログラミング鈴木雅大AIいらすとや京都精華大学ソースコード生成コンセプトアートAI PicassoTacticAIGMAIシチズンデベロッパーSonanticColie WertzEmposyNPMPGitHubCohereリドリー・スコットAIタレントFOOHウィザードリィMCN-AI連携モデル絵コンテAIタレントエージェンシーGPT-4oUrzas.aiストーリーボードmodi.aiProject Astra大阪大学BitSummitGoogle I/O 2024西川善司並木幸介KikiBlenderBitSummit Let’s Go!!Gemma 2サムライスピリッツ森寅嘉Zoetic AIVeoゼビウスSIGGRAPH 2021ペット感情認識ストリートファイター半導体Digital Dream LabsPaLM APIデジタルレプリカ音声加工Topaz Video Enhance AICozmoMakerSuiteGOT7マルタ大学DLSSタカラトミーSkebsynthesia田中達大山野辺一記NetEaseLOVOTDreambooth-Stable-DiffusionHumanRFInworld AI大里飛鳥DynamixyzMOFLINActors-HQMove AIRomiGoogle EarthSAG-AFTRAICRA2024U-NetミクシィGEPPETTO AIWGAIEEE13フェイズ構造ユニロボットStable Diffusion web UIチャーリー・ブルッカー大規模基盤モデルADVユニボPoint-EToroboXLandGato岡野原大輔東京ロボティクスAI model自己教師あり学習インピーダンス制御DEATH STRANDINGAI ModelsIn-Context Learning(ICL)深層予測学習Eric Johnson汎用強化学習AIZMO.AILoRA日立製作所MOBBY’Sファインチューニング早稲田大学Oculus Questコジマプロダクションロンドン芸術大学モビーディックグランツーリスモ尾形哲也生体情報デシマエンジンGoogle Brainダイビング量子コンピュータAIRECSound Controlアウトドアqubit汎用ロボットSYNTH SUPERAIスキャニングIBM Quantum System 2オムロンサイニックエックス照明Maxim PeterKarl Sims自動採寸北野宏明ViLaInJoshua RomoffArtnome3DLOOKダリオ・ヒルPDDLハイパースケープICONATESizerジェン・スン・フアンニューサウスウェールズ大学山崎陽斗ワコールHuggingFaceClaude Sammut立木創太スニーカーStable Audioオックスフォード大学浜中雅俊UNSTREET宗教Lars Kunzeミライ小町Newelse仏教杉浦孔明テスラ福井健策CheckGoodsコカ・コーラ田向権GameGAN二次流通食品VASA-1パックマンTesla Bot中古市場Coca‑Cola Y3000 Zero SugarVoxCeleb2Tesla AI DayWikipediaDupe KillerCopilot Copyright CommitmentAniTalkerソサエティ5.0Sphere偽ブランドテラバース上海大学SIGGRAPH 2020バズグラフXaver 1000配信京都大学Apple Intelligenceニュースタンテキ養蜂立福寛東芝Beewiseソニー・ピクチャーズ アニメーション音声解析DIB-R倉田宜典フィンテック感情分析Luma投資Fosters+Partners周 済涛Dream Machine韻律射影MILIZEZaha Hadid ArchitectsステートマシンNTT韻律転移三菱UFJ信託銀行ディープニューラルネットワークPerplexity
【JSAI2021】AIエージェントのインタラクション設計の諸相:AIは、他のAIや人間と協調できるのか?
2021.7.13先端技術

2021年6月8日から11日にオンラインで開催された第35回人工知能学会全国大会では、AIエージェントの基礎的なインタラクション設計をテーマにしたセッションが行われました。そのセッションではAIエージェントの学習技法や、他のAIエージェントあるいは人間との協調行動に関する発表がありました。この記事では、そうした発表を紹介していきます。
進化計算手法でパラメータを最適化する
慶應義塾大学理工学部の下川大樹氏は、「動的で複雑な環境におけるエージェントの行動生成」という論題で、AIエージェントのパラメータ調整を進化計算手法で行った実験に関して報告しました。
特定の環境と相互作用するAIエージェント研究で長らく問題となっているのが、さまざまな状況に臨機応変に対応する高度な汎用的適応力の実現です。現在のAIエージェントの適応力は、人間が有する柔軟なそれに遠く及びません。AIエージェントの適応力をより汎用的にするには、即応的な計画的行動(プランニング)と熟考的なそれの両立、機能の拡張性、そして創発行動による行動生成が求められます。
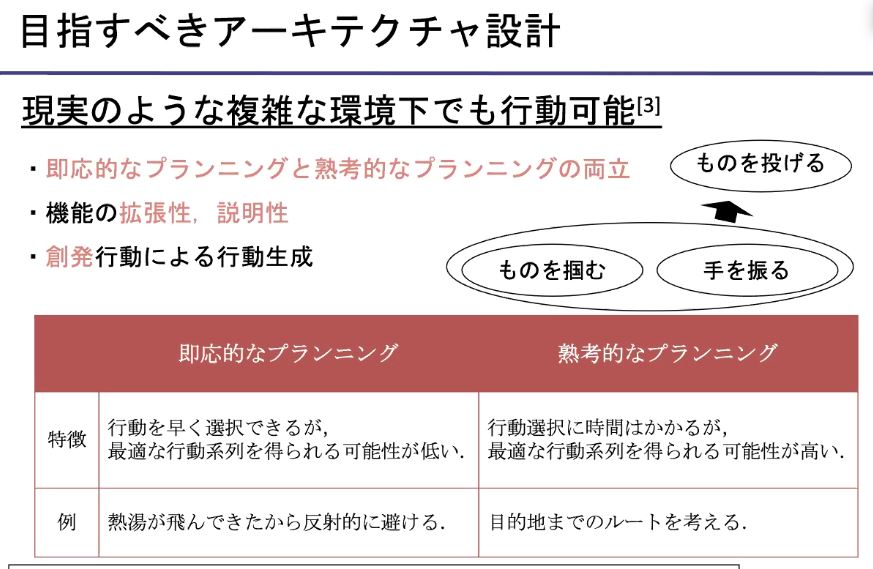
AIエージェントのアーキテクチャはさまざまなものが研究されてきましたが、下川氏の研究チームは汎用的な適応力の実現が期待できるとして「エージェント活性伝播ネットワーク」というアーキテクチャの改善に取り組みました。このアーキテクチャは環境からの刺激が一定量蓄積されるとニューロン間を伝播するというシンプルな仕組みながら、前述の汎用的適応力の3要件の実現が期待できるという利点があります。
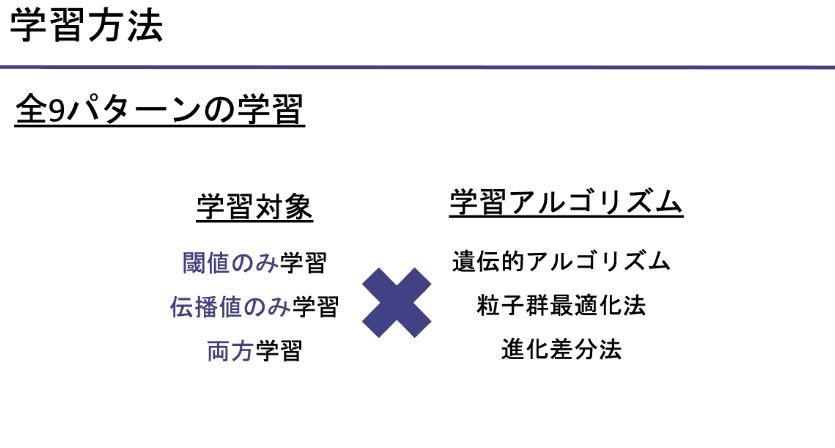
しかし、エージェント活性伝播ネットワークには(閾値と伝播値に関する)パラメータの調整方法が確立されていないという問題点があり、それゆえ従来は開発者が経験を頼りに手動で調整していました。そこで今回の研究では、パラメータを進化計算手法で自動調整することにしました。調査する手法には遺伝的アルゴリズム、粒子群最適化法、進化差分法を採用し、学習対象は閾値のみ、伝播値のみ、閾値と伝播値の両方の3種類としました。こうした計算手法と学習対象の組み合わせから導出できる全9パターンの学習を実験しました。
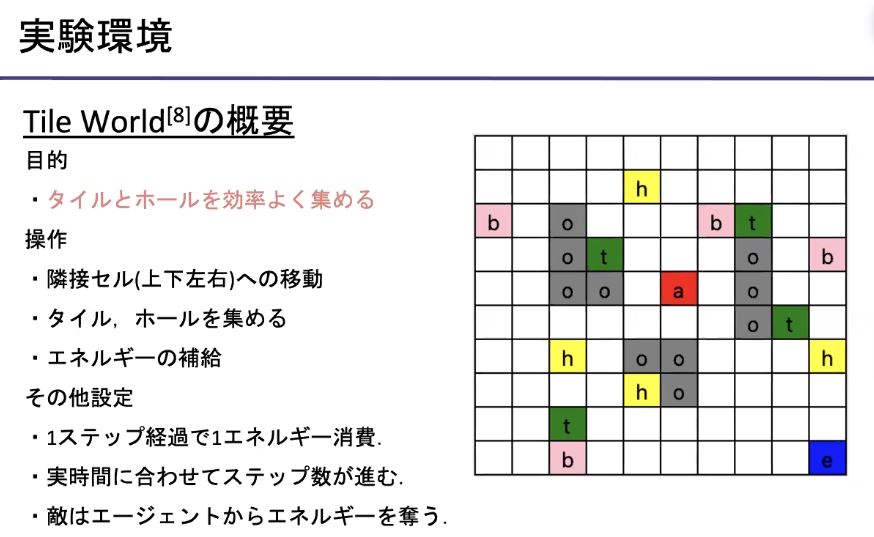
実験環境は、Tile Worldと呼ばれる簡単なゲームを用意しました。このゲームはグリッド状のステージのなかから、敵を避けながらタイルとホールを集めてスコアを競うというものです。このゲームでハイスコアを狙うには、敵を即座に避ける即応的行動とタイルとホールを効率的に集める熟考的行動の両方が必要となります。
Tile Worldを使った実験の結果、差分進化法を用いて閾値のみを学習した場合がもっとも高いスコアを獲得しました。また、ハイスコアを獲得した学習手法ほどAIエージェントの停止行動が多いことも確認できました。停止が多いのは、状況に応じて即応的な行動より熟考的なそれを優先していたからと考えられます。
Tile Worldのステージを拡大した実験も行いました。その結果、小さいステージでの実験と同様の結果が得られました。以上より差分進化法による閾値のみの学習はもっとも有効かつ汎用性がある、という結論が得られました。
ちなみに、今回の研究は特定の環境下における効率的なタスク遂行をテーマとしていますが、類似の研究テーマとして多様なAIエージェントの行動を効率的に(つまり、少ない計算資源によって)設計するものもあります。そうした類似研究として、バンダイナムコスタジオのリードAIプログラマである長谷洋平氏によるオンラインゲーム『BLUE PROTOCOL』の意思決定システムに関する発表やAIフィロソフィーに関する発表があります。同氏の研究では、「Preference-based HTN Planning」というプランニングアルゴリズムが採用されています。
AIエージェントの協働作業を最適化する
名古屋工業大学の松井俊浩氏は「距離情報に基づく観測と位置推定のための複数移動センサによる観測タスクへの非集型制約最適化の適用の一検討」と題して、複数のAIエージェントの協調行動を最適化する研究について発表しました。
今日、監視業務や危険地域の観測業務においてセンサを実装した複数のAIエージェントの協働が求められています。具体例として、特定の場所を複数の移動型カメラ付き監視ロボットで監視する、放射能を浴びる危険性のある地域における複数のロボットによる測量などが挙げられます。こうした業務では、AIエージェントどうしの位置情報の共有と活動地域全体の地理情報の収集が求められます。しかし、位置情報共有の精度を高く設定し過ぎると、活動地域全体の地理情報を収集するのに時間がかかってしまう、というようにすべてのタスクを高水準に遂行するのは困難を極めます。
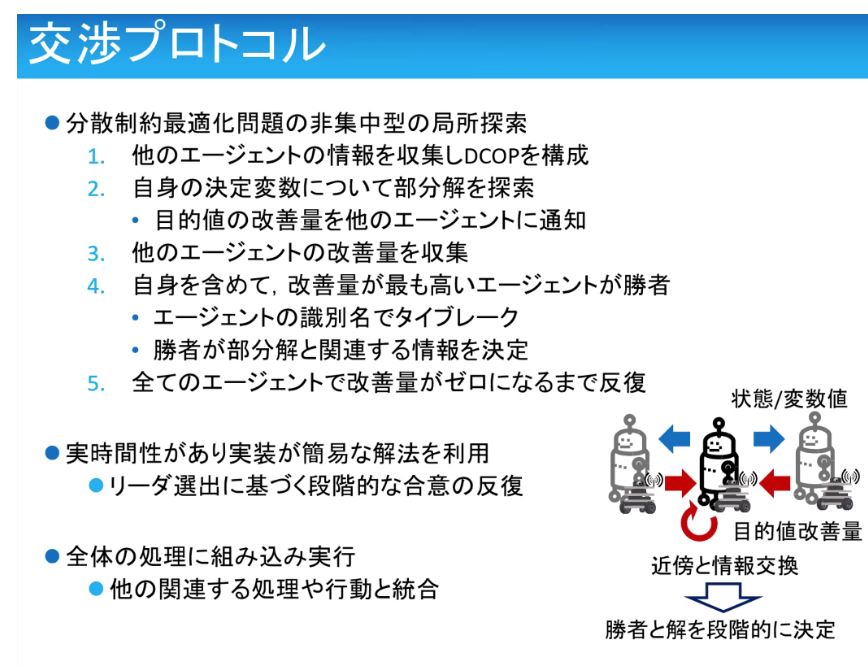
複数AIエージェントによる協調的なタスク遂行は、分散制約最適化問題としてアルゴリズム的に定式化されています。この最適化問題に対して、松井氏は複数のAIエージェントが情報共有してうえで、もっとも問題解決に貢献したAIエージェントの解を最適解として採用して、改善の余地がなくなるまで最適解算出プロセスを繰り返す交渉プロトコルを実装して実験を試みました。
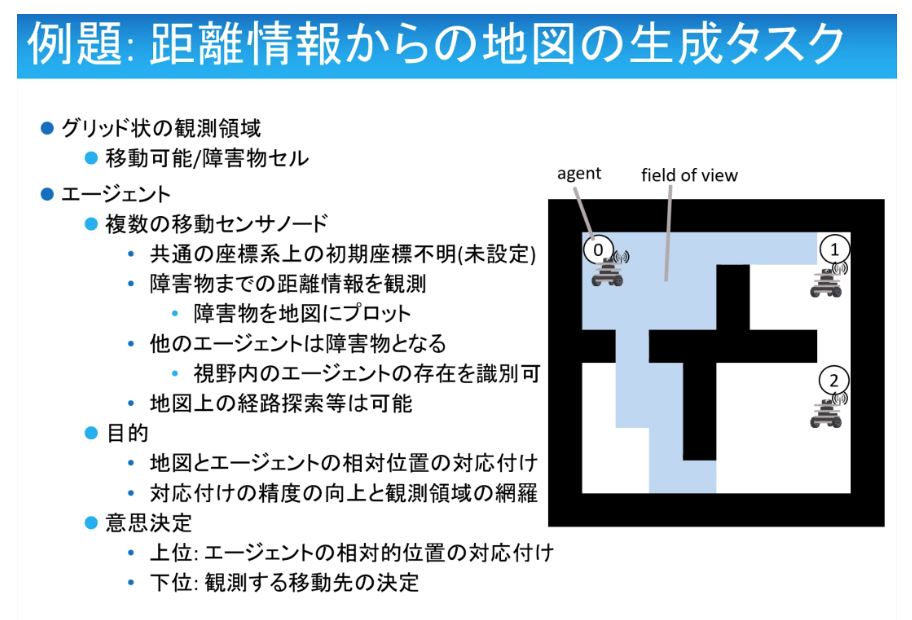
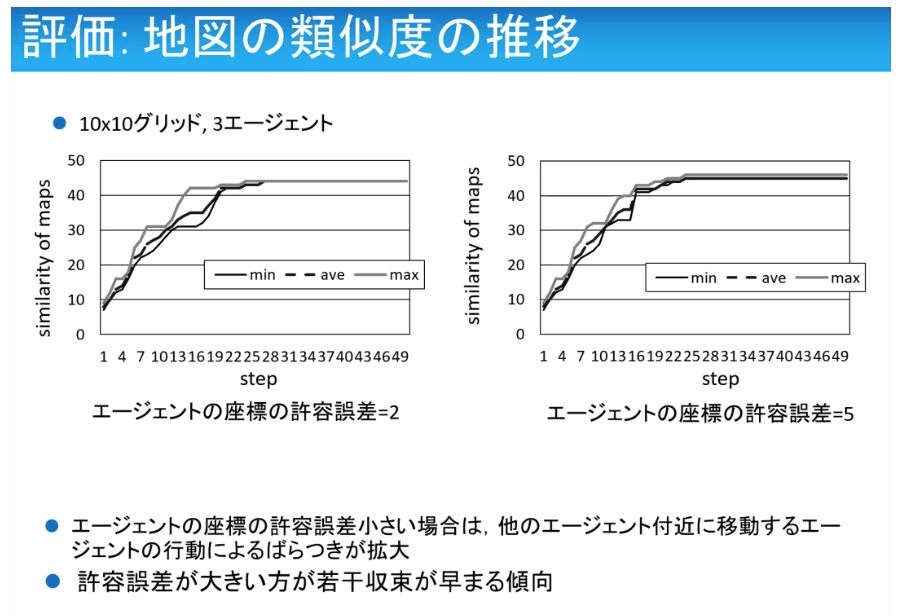
実験では、グリッドで構成された仮想世界を複数のAIエージェントが探索してマップを生成することが試みられました。具体的には、複数のAIエージェントが仮想世界の任意の初期位置から周囲を測量すると同時に、他のAIエージェントと位置情報を共有するというタスクを遂行します。こうした実験を位置情報の許容誤差を変えて複数回行いました。この実験における評価ポイントは、複数のAIエージェントが測量する地図の類似性、共有される位置情報の精度、および許容誤差のタスクへの影響です。
地図の類似性に関しては、許容誤差が小さい場合、他のAIエージェントに近づく行動が多くなるため、類似性が一定の値で安定するまでに(つまりは収束するまでに)時間がかかりました。対して、許容誤差が大きい場合は早く収束しました。
AIエージェント間の位置情報共有精度に関しては、許容誤差を小さく設定した場合、当然の帰結として共有される位置情報の精度は向上します。その一方で、誤差の拡大を避けるために観測範囲を広げない傾向も確認されました。許容誤差と観測範囲は、トレードオフの関係にあると言えます。
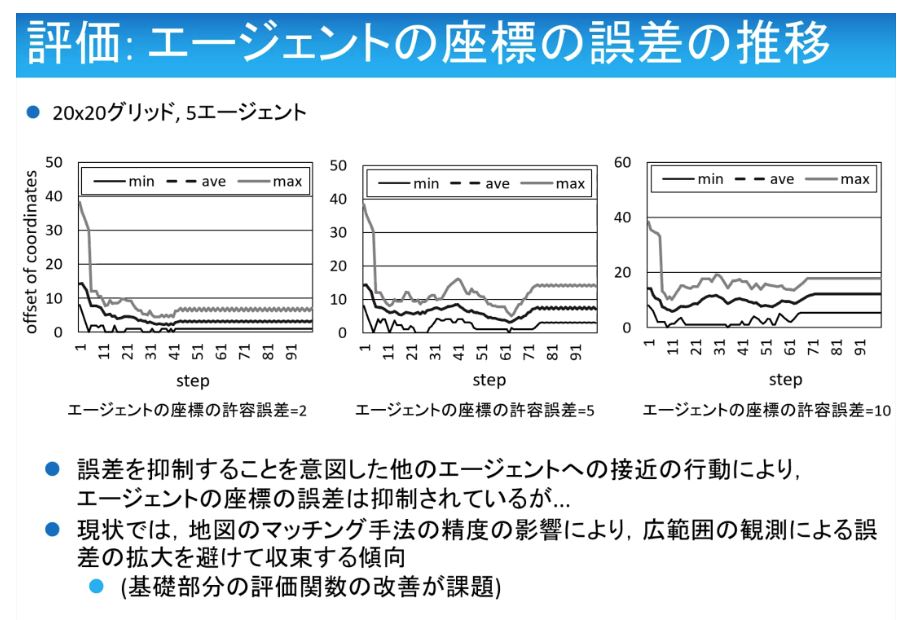
今後の課題として、松井氏はAIエージェントの位置情報共有精度と測量範囲の拡大を両立させたアルゴリズムの考案を挙げていました。
人間とAIエージェントの協働作業を数値化する
岡山県立大学の高津芳希氏は、「RoCoCoを用いた人間と機械の身体的協力行動の数理分析」と題して、協働タスク遂行シミュレーターを用いた人間とAIエージェントの協働行動の数理的分析について発表しました。
今日のロボットに対するニーズは、ライン工場で見られるような人間から隔離された産業用ロボットから店舗や医療現場で人間といっしょに働く協働ロボットにシフトしつつあります(コロナ禍によって、こうしたシフトが加速しています)。しかしながら、協働ロボットに関する知見が不足しているため、高津氏らの研究チームは人間とロボットの協働に関する「協力の理論」を構築するプロジェクトを立ち上げました。このプロジェクトに取り組むにあたっては、協働作業をシミュレーションできるソフトウェア「RoCoCo(「Role Coordinative Cooperation」の略称)」を活用しました。
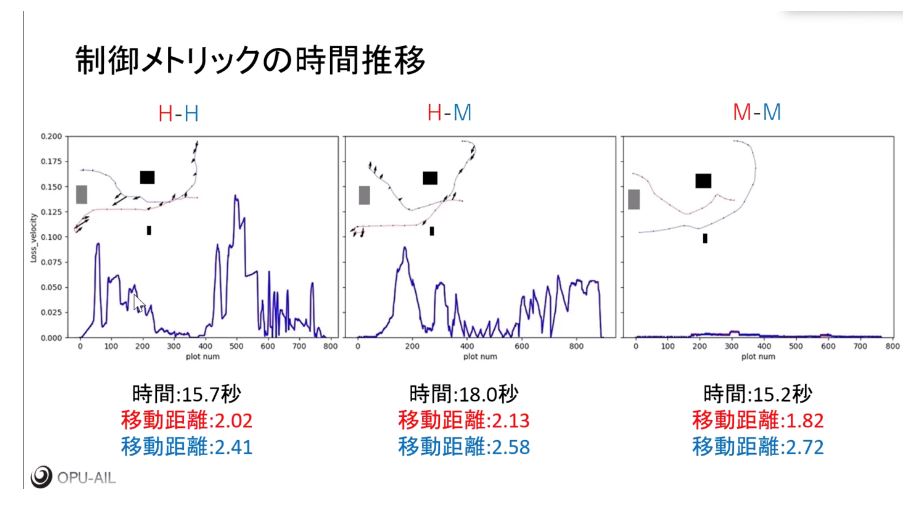
上記プロジェクトでは、人間とロボットが協力して机を運搬するタスクの効率性を測定する実験が行われました。この実験では21~25歳の5人の男性に参加してもらい、課題タスクを人間のみ、人間とロボット、ロボットのみの3パターンで実行して、タスク完了までの所要時間、タスク遂行時に使われた力などを測定しました。
実験した結果、タスク遂行効率性はロボットのみで遂行する場合がもっとも効率的で、次いで人間とロボットがよく、人間のみで遂行する場合がもっとも効率が悪いことが判明しました(以下のグラフ参照。グラフの線が平板であるほど効率がよいことを意味する)。
以上の実験で重要なのは、人間とロボットの協働作業を数量的に考察できた点にあります。協働作業の効率性を数値的に理解できれば、その効率性を改善する方法を考えられるようになります。
なお、高津氏はRoCoCoを用いた協働作業の数理的分析をメンタルヘルス、教育、福祉などの分野で応用したいと述べました。
人間とAIの間で社会的比較は生じるのか
筑波大学の大石真史氏は「エージェントの同化と対比による社会的比較の効果の検証」と題して、人間とAIの間の社会的比較の成立可否とその影響に関する研究を発表しました。
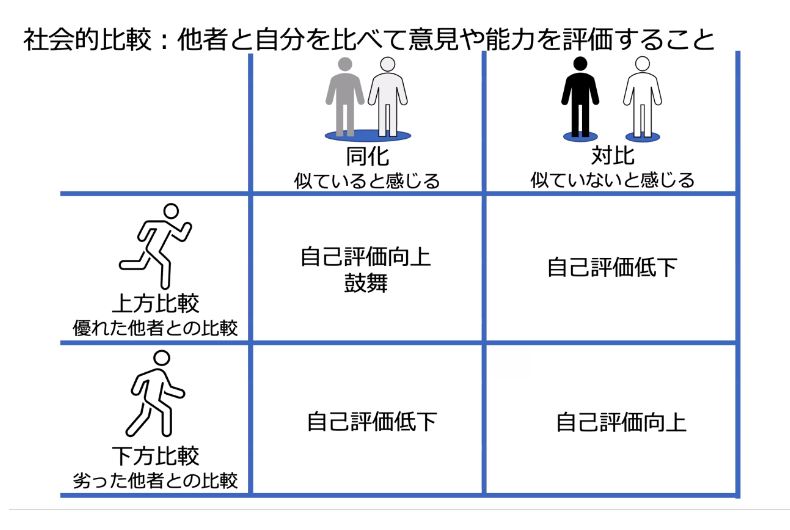
社会的比較とは、社会心理学における自己評価に影響を及ぼす他者との関係を論じた理論です。自己評価は、評価者が置かれている他者との関係によって高まったり低くなったりします。具体的には、自己と他者の関係をスキルの優劣という評価軸と、自己と他者が似ているかどうかという同化-対比という評価軸でとらえた場合、自己と似ていてスキル的に優れた他者と関係している場合、自己評価は高くなります。この現象は「エースのいるスポーツチームのメンバーは自分を誇らしく思う」のような具体例を挙げれば理解できるでしょう。こうした2つの評価軸でとらえた場合、自己評価への影響は以下の図のように4通り考えられます。
大石氏らの研究チームは、社会的比較が人間とAIの間でも成立するかを検証する実験を行いました。この実験に際しては、スキルの比較をタイピングで測定し、人間とAIの間の同化-対比関係は被験者にAIとチャットしてもらうことで構築するようにしました。そして、被験者にはAIとのタイピング競争をしてもらった後にアンケートを実施して、自己評価を測定するようにしました。なお、AIのタイピングスキルを競争前に測定した被験者のタイピングスキルにもとづいて上下させることで、社会的比較が成立する状況を作りました。
実験の結果、被験者とAIは実験計画通りに特定の同化-対比関係を構築したことが確認できました。自己評価の変化については、人間とAIの間でも社会的比較が成立すると仮定した場合、同化-上方比較の場合では自己評価が上がる上にタイピング結果も良くなり、同化-下方比較では自己評価が対比-下方比較より相対的に低くなる、と予想されます。しかし、実験からはこの予想は立証されませんでした。それゆえ、今回の実験では人間とAIの間の社会的比較は認められなかった、と結論できます。
一方で以上の実験では、同化-下方比較を除いた場合においてタイプミス率が増加した、という予想外の結果が得られました。この結果から、AIとの競争はそもそも人間の集中力を妨げる可能性があること、そして競争環境において人間は自分と似ていて自分より低スキルのAIと競うと集中できるかも知れないことが期せずしてわかりました。この知見は、例えばeスポーツのトレーニングシステムを開発する場合、プレイヤーが共感できてプレイヤーよりスキルを低く設定したAIキャラクターを練習相手にすれば、集中が続くようになるかも知れないことを示唆しています。
日本におけるAIの社会実装を推進するためには、人間とAI、あるいはAIどうしが協働するシーンを増やす必要があるでしょう。こうした協働シーンを実現するにあたって、この記事で紹介した研究は何かしらのヒントになるかも知れません。
Writer:吉本幸記、Image by TULIA COLOMBIA TORRES HURTADO from Pixabay


 RANKING
RANKING