モリカトロン株式会社運営「エンターテインメント×AI」の最新情報をお届けするサイトです。
- TAG LIST
- CGCGへの扉生成AI安藤幸央吉本幸記月刊エンタメAIニュース河合律子機械学習ディープラーニングOpenAILLM大規模言語モデルGoogleNVIDIA音楽グーグルGANモリカトロン森川幸人ChatGPT三宅陽一郎Stable DiffusionDeepMind強化学習人工知能学会ニューラルネットワークシナリオマイクロソフトQA自然言語処理AIと倫理GPT-3倫理Facebook大内孝子映画SIGGRAPHスクウェア・エニックス著作権アートキャラクターAIルールベースゲームプレイAIMinecraft敵対的生成ネットワークNPC音楽生成AI動画生成AIモリカトロンAIラボインタビューアニメーション3DCG画像生成NFTロボットファッションDALL-E2StyleGANプロシージャルディープフェイクマルチモーダルVFXMidjourney遺伝的アルゴリズムデバッグ自動生成VRメタAIMeta画像生成AIRed RamマンガインタビューゲームAIAdobeMicrosoftテストプレイマインクラフト小説CLIPテキスト画像生成深層学習CEDEC2019toio教育NeRFデジタルツインメタバース不完全情報ゲームStability AIボードゲームDALL-ESoraビヘイビア・ツリーCEDEC2021CEDEC2020作曲アストロノーカロボティクスナビゲーションAI高橋力斗AIアートGeminiメタ畳み込みニューラルネットワークアップルデジタルヒューマンELSIPlayable!スポーツはこだて未来大学エージェントGDC 2021プロンプトGPT-4手塚治虫汎用人工知能JSAI20223D広告DALL-E 3バーチャルヒューマンNVIDIA OmniverseGDC 2019マルチエージェントCEDEC2022市場分析AR懐ゲーから辿るゲームAI技術史鴫原盛之ジェネレーティブAIソニー東京大学栗原聡CNNマーケティングJSAI2024CMBERTMicrosoft Azure音声認識言霊の迷宮UnityOmniverseUbisoftJSAI2023Robloxがんばれ森川君2号電気通信大学SIGGRAPH ASIAHTNApple階層型タスクネットワークAIQVE ONE世界モデルアドベンチャーゲームインディーゲームJSAI2020GTC2023音声合成メタデータTensorFlowブロックチェーンイベントレポートキャリア模倣学習対話型エージェントAmazonサイバーエージェントトレーディングカードメディアアートDQNシーマン合成音声SIERunway水野勇太モリカトロン開発者インタビュー宮本茂則アバターブラック・ジャックGenvid TechnologiesガイスターStyleGAN2徳井直生村井源稲葉通将斎藤由多加Open AIベリサーブGTC2022GPT-3.5YouTube音声生成AISFNetflixJSAI2021松木晋祐Bard研究シムシティシムピープルZorkGPT-4oMCS-AI動的連携モデルマーダーミステリーモーションキャプチャーTEZUKA2020CEDEC2023AGIテキスト生成スパーシャルAIElectronic ArtsGDC Summerイーロン・マスク論文Stable Diffusion XL森山和道Audio2FaceNVIDIA Rivaeスポーツスタンフォード大学アーケードゲームテニスセガ人狼知能Google I/O類家利直FireflyeSportsBLUE PROTOCOLCEDEC2024aibo大澤博隆SFプロトタイピング銭起揚Runway Gen-3 AlphaチャットボットTikToktext-to-3DDreamFusion自動運転車ワークショップEpic GamesAIロボ「迷キュー」に挑戦AWSAdobe MAXクラウドAlphaZeroPreferred NetworksTransformerGPT-2rinnaAIりんなカメラ環世界中島秀之PaLMGitHub CopilotLLaMA哲学Apple Vision Proハリウッド宮路洋一Whisk理化学研究所Gen-1SIGGRAPH Asia 2024テキスト画像生成AI松尾豊人事データマイニングControlNet現代アートDARPA法律ドローンゲームエンジンUnreal EngineImagen人工生命バイアスサム・アルトマンVeoASBSぱいどんAI美空ひばり手塚眞LoRAデザインGDC 2025バンダイナムコ研究所ELYZANEDO建築ELIZAFSM-DNNMindAgentBIMLEFT 4 DEADくまうた通しプレイソニー・インタラクティブエンタテインメントOpenAI FiveMeshy本間翔太馬淵浩希Cygames岡島学ピクサー九州大学プラチナエッグイーサリアム効果音ボエダ・ゴティエビッグデータ中嶋謙互Amadeus Codeデータ分析自動翻訳MILENVIDIA ACEVeo 3ナラティブNianticOmniverse ReplicatorWCCFレコメンドシステムNVIDIA DRIVE SimWORLD CLUB Champion FootballNVIDIA Isaac SimSakana AI柏田知大軍事田邊雅彦トレカ慶應義塾大学Max CooperGPTDisneyPhotoshopPyTorch京都芸術大学ChatGPT4モンテカルロ木探索JSAI2025ByteDance眞鍋和子バンダイナムコスタジオコミコパヒストリアAI Frog Interactive新清士ラベル付け田中章愛ComfyUI齊藤陽介コナミデジタルエンタテインメント成沢理恵お知らせMagic Leap OneTencentサッカーバスケットボールLINEヤフーSuno AIKaKa CreationVOICEVOXtext-to-imageサルでもわかる人工知能VAETEZUKA2023DOOMリップシンキングRNNGameNGenグランツーリスモ・ソフィーUbisoft La Forgeスーパーマリオブラザーズ社員インタビュー知識表現ウォッチドッグス レギオンVTuberIGDA立教大学秋期GTC2022大阪公立大学HALOフォートナイトKLabどうぶつしょうぎジェイ・コウガミ音楽ストリーミングMIT野々下裕子Movie GenQosmoマシンラーニング5GMuZeroRival Peakpixivオムロン サイニックエックスGPTsセキュリティ対話エンジンポケモン3Dスキャン橋本敦史リトル・コンピュータ・ピープルCodexシーマン人工知能研究所コンピューティショナル・フォトグラフィーゴブレット・ゴブラーズ絵画3D Gaussian SplattingMicrosoft DesignerイラストシミュレーションSoul Machines柿沼太一完全情報ゲームバーチャルキャラクター坂本洋典宮本道人釜屋憲彦LLaMA 2ウェイポイントパス検索Hugging Face対談藤澤仁生物学XRGTC 2022xAI画像認識SiemensストライキStyleCLIPDeNAVoyager長谷洋平GDC 2024クラウドコンピューティングmasumi toyotaIBMぎゅわんぶらあ自己中心派OpenSeaGDC 2022Veo 2ウロチョロスSNSTextWorldEarth-2BingエコロジーMagentaソフトバンクSONYポケットモンスターELYZA PencilScenarioSIGGRAPH2023AIピカソGTC2021AI素材.comCycleGANテンセントAndreessen HorowitzQA Tech NightNetHack下田純也桑野範久キャラクターモーション音源分離NBAフェイクニュースユニバーサルミュージックRPGウィル・ライトWeb3SIGGRAPH 2022レベルデザインDreamerV3SIMAAIボイスアクター南カリフォルニア大学NVIDIA CanvasGDCGPUALifeオルタナティヴ・マシンサウンドスケープLaMDATRPGマジック:ザ・ギャザリングAI Dungeon介護BitSummitGemma 2Cube 3DゼビウスNetEaseInworld AIモリカトロンAIコネクトゲーム背景IEEEPoint-EアパレルClaude不気味の谷ナビゲーションメッシュファインチューニング早稲田大学グランツーリスモ写真高橋ミレイ北野宏明深層強化学習松原仁松井俊浩武田英明フルコトモリカコミックパックマンELYZA DIGESTジョージア工科大学Apple IntelligenceWWDCWWDC 2024西成活裕ハイブリッドアーキテクチャAI野々村真LINE AIトークサジェストApex Legends群衆マネジメントライブポートレイトGTC2025NinjaコンピュータRPGライブビジネスWonder StudioAdobe Max 2023GPT-4-turboFuxi Labアップルタウン物語新型コロナ土木佐藤恵助Naraka:Bladepoint MobileKELDIC周済涛Bing Chat大道麻由バトルロイヤルメロディ言語清田陽司インフラBing Image Creator物語構造分析ビヘイビアツリーゲームTENTUPLAYサイバネティックス慶応義塾大学SoftServeMARVEL Future FightAstro人工知能史Amazon BedrockAssistant with Bard渡邉謙吾ALNAIRタイムラプスEgo4DAI哲学マップThe Arcadeここ掘れ!プッカAMRIバスキア星新一X.AISearch Generative ExperienceBLADE日経イノベーション・ラボStyleGAN-XLX Corp.Dynalang濱田直希GAGA敵対的強化学習StyleGAN3TwitterVLE-CE大柳裕⼠QUEEN階層型強化学習GOSU Data LabGANimatorXホールディングス加納基晴Runway Gen-4WANNGOSU Voice AssistantVoLux-GANMagiAI ActSkyReels竹内将SenpAI.GGProjected GANEU研究開発事例MobalyticsSelf-Distilled StyleGANSDXLArs Electronica赤羽進亮Stable Virtual CameraニューラルレンダリングRTFKTAI規制遊戯王IntangibleAWS SagemakerPLATONIKE欧州委員会UDI(Universal Duel Interface)ブライアン・イーノ映像セリア・ホデント形態素解析frame.ioClone X欧州議会第一工科大学EnoUXAWS LambdaFoodly村上隆欧州理事会佐竹空良Brain One誤字検出MusicLM小林篤史AlphaEvolve認知科学中川友紀子Digital MarkAudioLMContinuous Thought Machine(CTM)ゲームデザインSentencePieceアールティSnapchatMusicCaps荻野宏実ArmLUMINOUS ENGINEクリエイターコミュニティAudioCraft伊藤黎Stable Audio Open SmallLuminous ProductionsBlenderBot 3バーチャルペットビヘイビアブランチWord2Worldパターン・ランゲージ竹村也哉Meta AINVIDIA NeMo ServiceMubertWPPSTORY2GAMEちょまどマーク・ザッカーバーグヴァネッサ・ローザMubert RenderGeneral Computer Control(GCC)ウィットウォーターランド大学GOAPWACULVanessa A RosaGen-2Cradle森川の頭の中Adobe MAX 2021陶芸Runway AI Film FestivalSpiral.AI花森リドPlay.htPreVizItakoLLM-7bGoogle I/O 2025音声AI静岡大学AIライティングLiDARCharacter-LLM明治大学FlowOmniverse AvatarAIのべりすとPolycam復旦大学北原鉄朗Lyra 2FPSQuillBotdeforumChat-Haruhi-Suzumiya中村栄太MusicFX DJマルコフ決定過程NVIDIA MegatronCopysmith涼宮ハルヒ日本大学Animon.aiNVIDIA MerlinJasperハーベストEmu VideoヤマハツインズひなひまNVIDIA MetropolisForGames前澤陽Mayaパラメータ設計ゲームマーケットペリドット増田聡Deep Q-Learningバランス調整岡野翔太Dream Track採用AlphaGO協調フィルタリング郡山喜彦Music AI Toolsスペースインベーダーテキサス大学ジェフリー・ヒントンLyria科学史プリンス・オブ・ペルシャGoogle I/O 2023Yahoo!知恵袋AIサイエンティストドラゴンクエストIVAlphaDogfight TrialsAI Messenger VoicebotインタラクティブプロンプトAITerra堀井雄二エージェントシミュレーションOpenAI Codex武蔵野美術大学AI Overview山名学StarCraft IIHyperStyleBingAI石渡正人電通タイトーFuture of Life InstituteRendering with Style手塚プロダクションAICO2カプコンIntel林海象BitSummit DriftUbi AnvilエンジンLAIKADisneyリサーチヴィトゲンシュタイン古川善規V1 Video ModelRotomationGauGAN論理哲学論考Lightroom大規模再構成モデルOmega CrafterArtificial AnalysisGauGAN2CanvaLRMSPACE INVADIANSVideo Arenaドラゴンクエストライバルズ画像言語表現モデルObjaverse西島大介Video Model Leaderboard不確定ゲームSIGGRAPH ASIA 2021PromptBaseBOOTHMVImgNet吉田伸一郎Claude 3.5Dota 2ディズニーリサーチpixivFANBOXOne-2-3-45SIGGRAPH2024MistralMitsuba2バンダイナムコネクサス虎の穴3DガウシアンスプラッティングMotion-I2VソーシャルゲームEmbeddingワイツマン科学研究所ユーザーレビューFantiaワンショット3D生成技術樋口恭介GTC2020CG衣装mimicとらのあなToonify3DClaude 4NVIDIA MAXINEVRファッションBaidu集英社FGDC生成対向ネットワーク小川 昴淡路滋ビデオ会議ArtflowERNIE-ViLG少年ジャンプ+Future Game Development Conference拡散モデルホラーゲームグリムノーツEponym古文書ComicCopilot佐々木瞬DiffusionStable Diffusion 1.5ゴティエ・ボエダ音声クローニング凸版印刷階層型物語構造Gautier Boeda階層的クラスタリングGopherAI-OCRゲームマスターうめ夏目漱石画像判定Inowrld AI小沢高広漱石書簡Julius鑑定MODAniqueドリコム京都情報大学院大学TPRGOxia PalusGhostwriter中村太一ai and上野未貴バーチャル・ヒューマン・エージェントtoio SDK for UnityArt RecognitionSkyrimエグゼリオSaaSクーガー実況パワフルサッカースカイリムCopilotインサイト石井敦NHC 2021桃太郎電鉄RPGツクールMZカスタマーサポート茂谷保伯池田利夫桃鉄ChatGPT_APIMZserial experiments lainComfyUI-AdvancedLivePortraitGDMC新刊案内パワサカダンジョンズ&ドラゴンズAI lainGUIマーベル・シネマティック・ユニバースOracle RPGPCGMITメディアラボMCU岩倉宏介深津貴之PCGRLアベンジャーズPPOxVASynthDungeons&DragonsVideo to Videoマジック・リープDigital DomainMachine Learning Project CanvasLaser-NVビートルズiPhone 16MagendaMasquerade2.0国立情報学研究所ザ・ビートルズ: Get BackOpenAI o1ノンファンジブルトークンDDSPフェイシャルキャプチャー石川冬樹MERFDemucsAIスマートリンクスパコンAlibaba音楽編集ソフトシャープ里井大輝KaggleスーパーコンピュータVQRFAdobe Auditionウェアラブル山田暉松岡 聡nvdiffreciZotopeCE-LLMAssassin’s Creed OriginsAI会話ジェネレーターTSUBAME 1.0NeRFMeshingRX10Communication Edge-LLMSea of ThievesTSUBAME 2.0LERFMoisesGEMS COMPANYmonoAI technologyLSTMABCIマスタリングAIペットモリカトロンAIソリューション富岳レベルファイブYahoo!ニュース初音ミクOculusコード生成AISociety 5.0リアム・ギャラガーAI Comic Factory転移学習テストAlphaCode夏の電脳甲子園グライムスAI comic GeneratorBaldur's Gate 3Codeforces座談会BoomyComicsMaker.aiCandy Crush Saga自己増強型AIジョン・レジェンドGenie AILlamaGen.aiSIGGRAPH ASIA 2020COLMAPザ・ウィークエンドSIGGRAPH Asia 2023GAZAIADOPNVIDIA GET3DドレイクC·ASEFlame PlannerデバッギングBigGANGANverse3DFLARE動画ゲーム生成モデルMaterialGANダンスグランツーリスモSPORTAI絵師エッジワークスMagicAnimateReBeLUGC日本音楽作家団体協議会Animate AnyoneVirtuals ProtocolGTソフィーPGCFCAインテリジェントコンピュータ研究所VolvoFIAグランツーリスモチャンピオンシップVoiceboxアリババMarioVGGNovelAIさくらインターネットDreaMovingRival PrakDGX A100NovelAI DiffusionVISCUIT松原卓二ぷよぷよScratchArt Transfer 2ユービーアイソフトWebcam VTuberモーションデータスクラッチArt Selfie 2星新一賞ビスケットMusical Canvas北尾まどかポーズ推定TCGプログラミング教育The Forever Labyrinth将棋メタルギアソリッドVメッシュ生成Refik AnadolFSMメルセデス・ベンツQRコードVALL-EAlexander RebenMagic Leap囲碁Deepdub.aiRhizomatiksナップサック問題Live NationEpyllionデンソーAUDIOGENMolmo汎用言語モデルWeb3.0マシュー・ボールデンソーウェーブEvoke MusicPixMoAIOpsムーアの法則原昌宏AutoFoleyQwen2 72BSpotifyスマートコントラクト日本機械学会Colourlab.AiDepth ProReplica Studioロボティクス・メカトロニクス講演会ディズニーamuseChitrakarAdobe MAX 2022トヨタ自動車Largo.aiVARIETAS巡回セールスマン問題かんばん方式CinelyticAI面接官ジョルダン曲線メディアAdobe ResearchTaskadeキリンホールディングス政治Galacticaプロット生成Pika.art空間コンピューティングクラウドゲーミングAI Filmmaking AssistantDream Screen和田洋一リアリティ番組映像解析FastGANSynthIDStadiaジョンソン裕子4コママンガAI ScreenwriterFirefly Video ModelMILEsNightCafe東芝デジタルソリューションズ芥川賞Stable Video 4Dインタラクティブ・ストリーミングLuis RuizSATLYS 映像解析AI文学AI受託開発事例インタラクティブ・メディア恋愛田中志弥PFN 3D ScanElevenLabsタップルPlayable!3D東京工業大学HeyGenAbema TVPlayable!MobileLudo博報堂After EffectsNECAdobe MAX 2024ラップPFN 4D Scan絵本木村屋SneaksSIGGRAPH 2019ArtEmisZ世代DreamUp出版GPT StoreIllustratorAIラッパーシステムDeviantArtAmmaar Reshi生成AIチェッカーMeta Quest 3Waifu DiffusionStoriesユーザーローカルXR-ObjectsGROVERプラスリンクス ~キミと繋がる想い~元素法典StoryBird九段理江PeridotFAIRSTCNovel AIVersed東京都同情塔Orionチート検出Style Transfer ConversationProlificDreamer防犯オンラインカジノRCPUnity Sentis4Dオブジェクト生成モデルO2RealFlowRinna Character PlatformUnity MuseAlign Your GaussiansScam DetectioniPhoneCALACaleb WardAYGLive Threat DetectionDeep Fluids宮田龍MAV3D乗換NAVITIMEMeInGameAmelia清河幸子ファーウェイKaedimAIGraphブレイン・コンピュータ・インタフェース西中美和4D Gaussian Splatting3DFY.aiBCIGateboxアフォーダンス安野貴博4D-GSLuma AILearning from VideoANIMAKPaLM-SayCan斧田小夜GlazeAvaturn予期知能逢妻ヒカリWebGlazeBestatセコムNightShadeOasisユクスキュルバーチャル警備システムCode as PoliciesSpawningDecartカント損保ジャパンCaPHave I Been Trained?Dejaboom!CM3leonFortniteUnbounded上原利之Stable DoodleUnreal Editor For FortniteEtchedドラゴンクエストエージェントアーキテクチャアッパーグラウンドコリジョンチェックT2I-Adapter声優PAIROCTOPATH TRAVELERパブリシティ権西木康智Volumetrics日本俳優連合OCTOPATH TRAVELER 大陸の覇者山口情報芸術センター[YCAM]AIワールドジェネレーター日本芸能マネージメント事業者協会アルスエレクトロニカ2019品質保証YCAM日本マネジメント総合研究所Rosebud AI Gamemaker日本声優事業社協議会StyleRigAutodeskアンラーニング・ランゲージLayerIAPP逆転オセロニアBentley Systemsカイル・マクドナルドLily Hughes-RobinsonCharisma.aiTripo 2.0ワールドシミュレーターローレン・リー・マッカーシーColossal Cave AdventureMeta 3D Gen奥村エルネスト純いただきストリートH100鎖国[Walled Garden]プロジェクトAdventureGPT調査スマートシティ齋藤精一大森田不可止COBOLSIGGRAPH ASIA 2022リリー・ヒューズ=ロビンソンMeta Quest都市計画高橋智隆DGX H100VToonifyBabyAGIIP松本雄太ロボユニザナックDGX SuperPODControlVAEGPT-3.5 Turbo早瀬悠真泉幸典仁井谷正充変分オートエンコーダーカーリング強いAIGenie 2ロボコレ2019Instant NeRFフォトグラメトリウィンブルドン弱いAIWorld Labsartonomous回帰型ニューラルネットワークCybeverbitGANsDeepJoin戦術分析Third Dimension AIAzure Machine LearningAzure OpenAI Serviceパフォーマンス測定Lumiere東北大学意思決定モデル脱出ゲームDeepLIoTUNetGemini 2.0Hybrid Reward Architectureコミュニティ管理DeepL WriteProFitXImageFXSuper PhoenixWatsonxMusicFXProject MalmoオンラインゲームAthleticaTextFXフロンティアワークス気候変動コーチング機械翻訳Project Paidiaシンギュラリティ北見工業大学KeyframerSimplifiedProject Lookoutマックス・プランク気象研究所レイ・カーツワイル北見カーリングホールAI Voice over GeneratorWatch Forビョルン・スティーブンスヴァーナー・ヴィンジ画像解析Gemini 1.5AI Audio Enhancer気象モデルRunway ResearchじりつくんAI StudioエーアイLEFT ALIVE気象シミュレーションMake-A-VideoNTT SportictVertex AIAITalk長谷川誠ジミ・ヘンドリックス環境問題PhenakiAIカメラChat with RTXコエステーションBaby Xカート・コバーンDreamixSTADIUM TUBESlackロバート・ダウニー・Jr.エイミー・ワインハウスSDGsText-to-ImageモデルPixelllot S3Slack AIPlayStationPokémon Battle Scopeダフト・パンクメモリスタAIスマートコーチVRMLGlenn MarshallkanaeruTechno MagicThe Age of A.I.Story2Hallucination音声変換Latitude占いゴーストバスターズレコメンデーションJukeboxDreambooth行動ロジック生成AIスパイダーマンVeap Japanヤン・ルカンConvaiポリフォニー・デジタルEAPneoAIPerfusionNTTドコモ荒牧伸志SIFT福井千春DreamIconニューラル物理学EmemeProject SidDCGAN医療mign毛髪GenieAlteraMOBADANNCEメンタルケアstudiffuse荒牧英治汎用AIエージェントRobert Yangハーバード大学Edgar Handy中ザワヒデキAIファッションウィークRazer研修デューク大学大屋雄裕インフルエンサーProject AVA中川裕志Grok-1Streamlabsmynet.aiローグライクゲームAdreeseen HorowitzMixture-of-ExpertsIntelligent Streaming Assistant東京理科大学NVIDIA Avatar Cloud EngineMoEProject DIGITS人工音声NeurIPS 2021産業技術総合研究所Replica StudiosClaude 3スーパーコンピューターリザバーコンピューティングSmart NPCsClaude 3 Haikuエージェンテックプレイ動画ヒップホップ対話型AIモデルRoblox StudioClaude 3 SonnetAI Shorts詩ソニーマーケティングPromethean AIClaude 3 Opusテルアビブ大学サイレント映画もじぱnote森永乳業DiffUHaul環境音暗号通貨note AIアシスタントMusiioC2PATrailBlazerFUZZLEKetchupEndelゲーミフィケーションヴィクトリア大学ウェリントンAlterationAI NewsTomo Kiharazeroscope粒子群最適化法Art SelfiePlayfoolQNeRF進化差分法オープンワールドArt TransferSonar遊びカーネギーメロン大学群知能下川大樹AIFAPet PortraitsSonar+DtsukurunRALF高津芳希P2EBlob Opera地方創生グラフィック大石真史クリムトDolby Atmos吉田直樹メイクBEiTStyleGAN-NADASonar Music Festival素材CanvasDETRライゾマティクスProjectsSporeクリティックネットワーク真鍋大度OpenAI JapanDeepSeekデノイズUnity for Industryアクターネットワーク花井裕也Voice EngineDeepSeek-R1画像処理DMLabRitchie HawtinCommand R+SentropyGLIDEControl SuiteErica SynthOracle Cloud InfrastructureLoopyCPUDiscordAvatarCLIPAtari 100kUfuk Barış MutluGoogle WorkspaceリップシンクSynthetic DataAtari 200MJapanese InstructBLIP AlphaUdioCyberHostCALMYann LeCun日本新聞協会立命館大学OmniHuman-1プログラミング鈴木雅大AIいらすとや京都精華大学CSAMソースコード生成コンセプトアートAI PicassoTacticAIImagen 3GMAIシチズンデベロッパーSonanticColie WertzEmposyNPMPGoogle LabsGitHubCohereリドリー・スコットAIタレントFOOHMicrosoft MuseウィザードリィMCN-AI連携モデル絵コンテAIタレントエージェンシーゲーム生成モデルUrzas.aiストーリーボードmodi.aiProject AstraWHAMデモンストレーター大阪大学Google I/O 2024ChatGPT Edu西川善司並木幸介KikiBlenderBitSummit Let’s Go!!滋賀大学サムライスピリッツ森寅嘉Zoetic AISIGGRAPH 2021ペット感情認識キリンビールストリートファイター半導体Digital Dream LabsPaLM APIデジタルレプリカ音声加工桜AIカメラTopaz Video Enhance AICozmoMakerSuiteGOT7マルタ大学Solist-AIDLSSタカラトミーSkebsynthesia田中達大ローム山野辺一記LOVOTDreambooth-Stable-DiffusionHumanRF大里飛鳥DynamixyzMOFLINActors-HQMove AIベンチマークRomiGoogle EarthSAG-AFTRAICRA2024FactorioU-NetミクシィGEPPETTO AIWGAHao AI Lab13フェイズ構造ユニロボットStable Diffusion web UIチャーリー・ブルッカー大規模基盤モデルカリフォルニア大学ADVユニボToroboGamingAgentXLandGato岡野原大輔東京ロボティクスAI model自己教師あり学習インピーダンス制御AnthropicDEATH STRANDINGAI ModelsIn-Context Learning(ICL)深層予測学習Claude 3.7 SonnetEric Johnson汎用強化学習AIZMO.AI日立製作所Factorio Learning EnvironmentMOBBY’SFLEOculus Questコジマプロダクションロンドン芸術大学モビーディック尾形哲也Deepseek-v3生体情報デシマエンジンGoogle Brainダイビング量子コンピュータAIRECGemini-2-FlashSound Controlアウトドアqubit汎用ロボットLlama-3.3-70BSYNTH SUPERAIスキャニングIBM Quantum System 2オムロンサイニックエックスGPT-4o-Mini照明Maxim PeterKarl Sims自動採寸ViLaInJoshua RomoffArtnome3DLOOKダリオ・ヒルPDDLZOZO NEXTハイパースケープICONATESizerジェン・スン・フアンニューサウスウェールズ大学ZOZO山崎陽斗ワコールHuggingFaceClaude SammutFashion Intelligence System立木創太スニーカーStable Audioオックスフォード大学Partial Visual-Semantic Embedding浜中雅俊UNSTREET宗教Lars KunzeWEARミライ小町Newelse仏教杉浦孔明GPT-4Vテスラ福井健策CheckGoodsコカ・コーラ田向権ソイル大学GameGAN二次流通食品VASA-1Tesla Bot中古市場Coca‑Cola Y3000 Zero SugarVoxCeleb2AIパズルジェネレーターTesla AI DayWikipediaDupe KillerCopilot Copyright CommitmentAniTalkerDolphinGemmaソサエティ5.0Sphere偽ブランドテラバース上海大学SIGGRAPH 2020バズグラフXaver 1000配信京都大学Wild Dolphin Projectニュースタンテキ養蜂立福寛SoundStreamトークナイザー東芝Beewiseソニー・ピクチャーズ アニメーション音声解析音声処理技術DIB-R倉田宜典フィンテック感情分析LumaGPT-4.1投資Fosters+Partners周 済涛Dream MachineGPT-4.1 mini韻律射影MILIZEZaha Hadid ArchitectsステートマシンNTTGPT-4.1 nano韻律転移三菱UFJ信託銀行ディープニューラルネットワークPerplexityLINE AI
【CEDEC2020】aiboの”賢さ”と”可愛さ”を作るAIの秘密
2020.10.21先端技術

ソニーのエンターテインメントロボット「aibo」は、実物を見れば誰もがそう感じると思いますが、非常に「かわいい」仕草や行動を取ります。まるで、生きているペットの犬や猫のように、コミュニケーションを取れているのではないかと思うくらいの知能が伺えるのです。そのaiboの知能はどうやって作られているのでしょうか、その秘密をソニー株式会社の藤本吉秀氏がCEDEC2020で解説しました。
生命感をどう演出するか
2016年からaibo開発担当ソフトエンジニアを務めている藤本氏は、自身の仕事を「aiboの実際の振る舞いを作って、動かして、人の心を動かすという仕事だ」と言います。猫や犬がこちらを見ていたりするとき、お腹が空いているのかな、もしかして遊んで欲しいのかな、と人間は勝手に相手の気持ちを感じてしまいます。動物の仕草や行動が人間の心に作用し、何らかの感情を起こします。こうしたエンターテインメントの作り方はゲームと共通していると言えます。
通常の家電(家電ロボットも加えて)では、例えば「自律的に近づいて来る」という要素が考慮されることはあまりありません。つまり、aiboは家電のように家の中に置かれるプロダクトではあるのですが、そういう点で従来の家電とは全く製作のコンセプトが異なるわけです。藤本さんは、人とプロダクトの距離感から、その違いを次のように分析します。
通常の家電、テレビとかエアコンがWi-Fiなど無線通信を使う方向に進化していって、どんどんプロダクトと使う人との距離が離れていく。人とプロダクトを離そう離そうというふうに作られています。aiboの場合は、人とどれぐらい近づけるか、むしろ触ってもらいたい、自分から触りにいきたいというコンセプトで作っています。スマート工場のロボットを開発するのとはまた違って、ゲームのキャラクターを作成するような感覚でaiboを開発していました。(藤本吉秀氏)
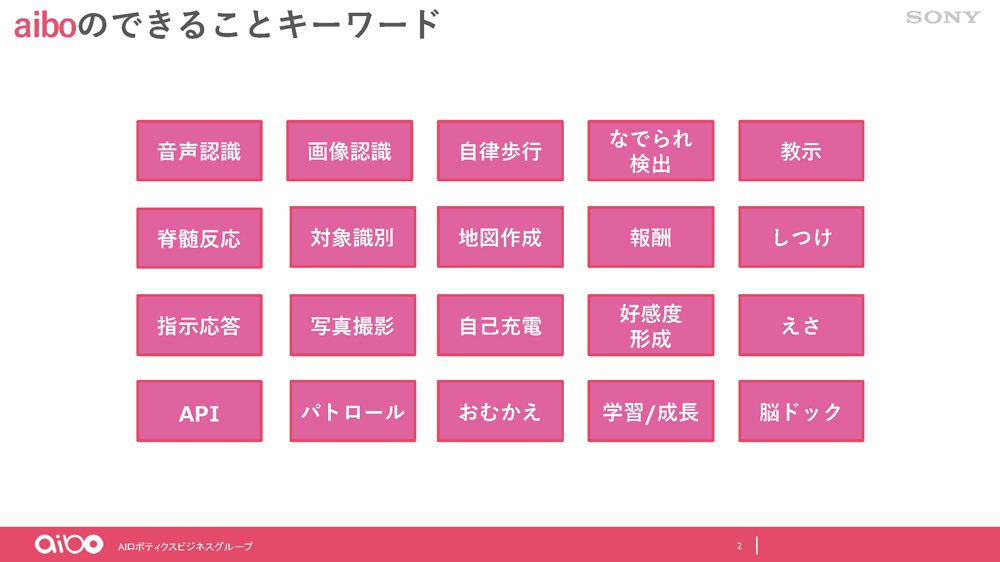
aiboにできることを書き出すと、音声認識・画像認識から、パトロール、お迎え、なでられ検出、などが並び、プロダクトとして求められていることが通常の家電・家電ロボットとは違うのが分かります。
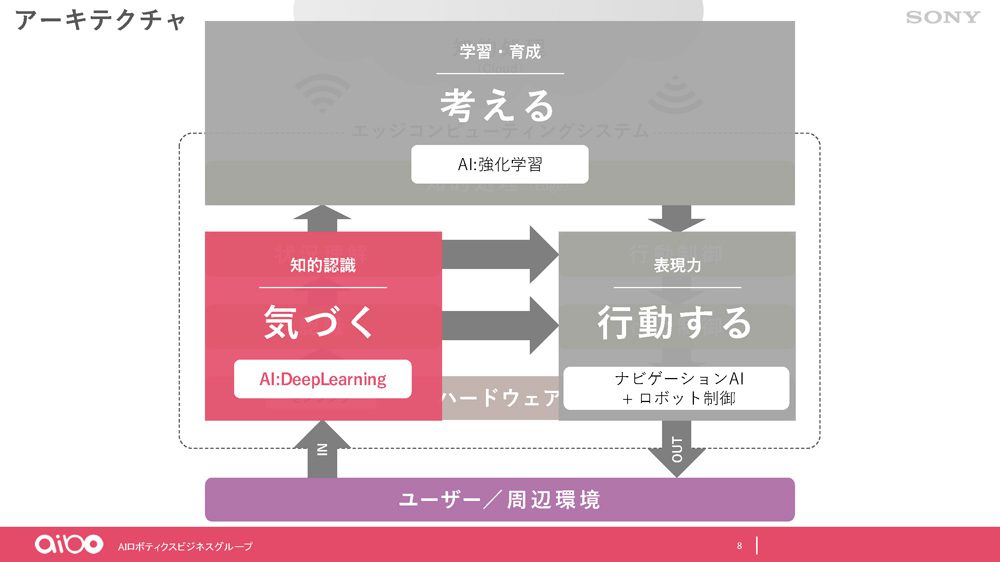
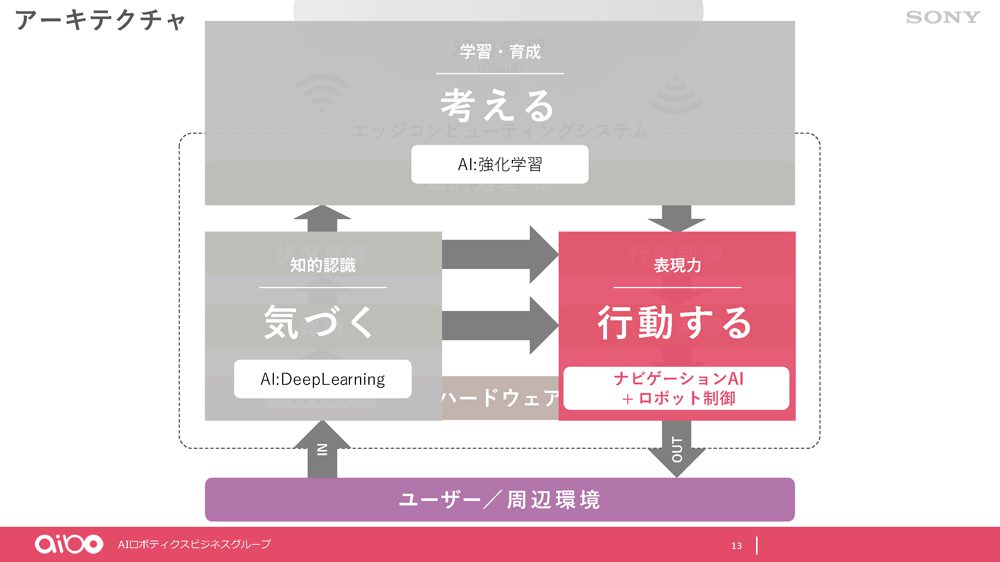
どういうロボットなら、家族の一員として受け入れてもらえるのか、どんなロボットなら人に寄り添うことができるのか、その鍵は「生命感」です。その生命感を演出するために、藤本氏らは次の4つのカテゴリーで考えていきました。「愛らしさ」「表現力」「知的認識」「学習・育成」です。左側が外観や仕草により生み出されるもの、右側がaiboの知能部分と言えます。

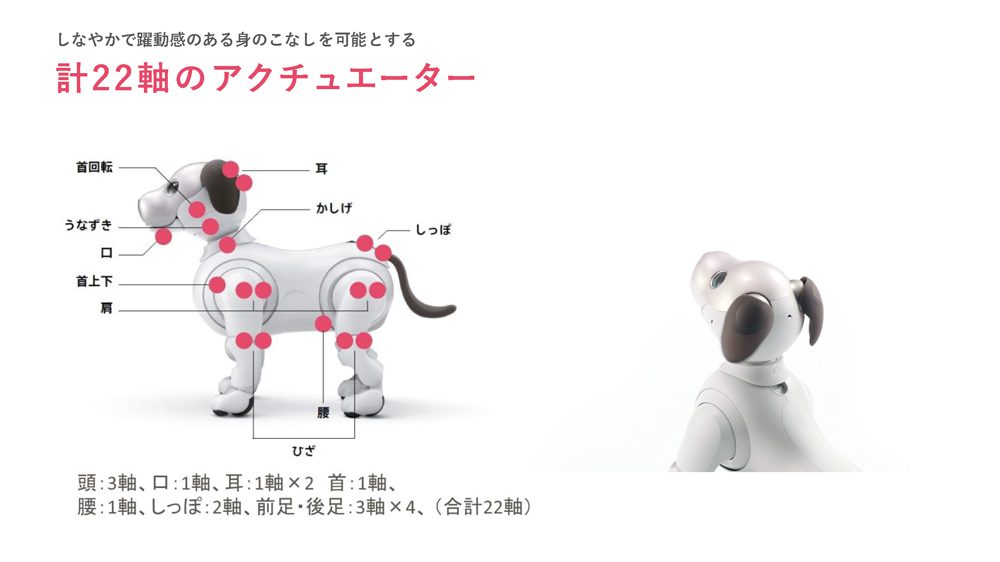
可愛らしさの源になる外観は、一匹の犬をモチーフにしたものではなく、色々な人に受け入れてもらいやすいようさまざまな犬をモチーフにしたフォルムです。22個のアクチュエーターを搭載し、ふるまいを表現します。

どういうふるまい、行動をするか決定するのはaiboの「考える」部分です。周囲の環境をセンシングした結果を受け、何をどうするか、アウトプットの判断を行います。
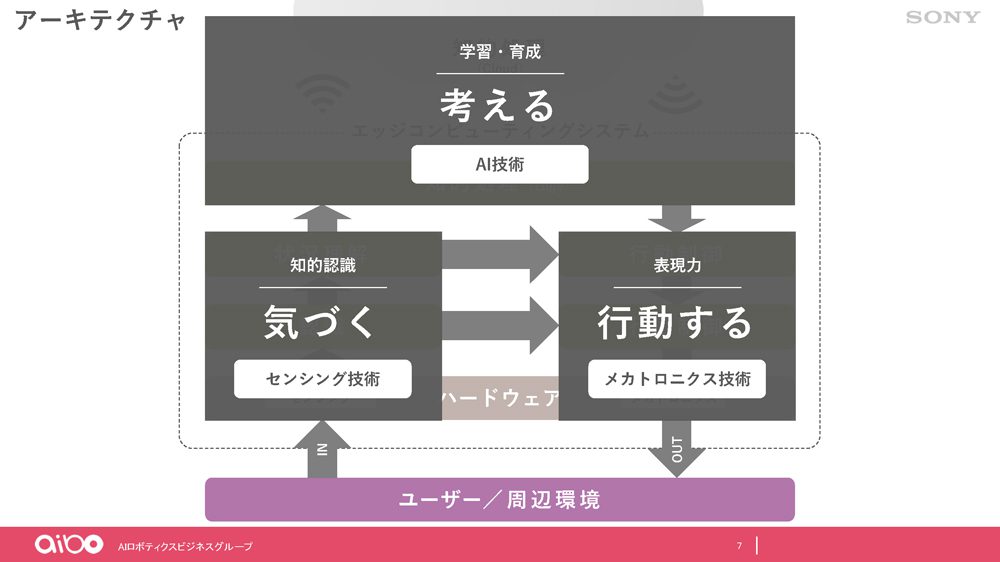
インプットとなるセンシングのデータは単純なセンサーによるものですが、それを認識し、複合的に状況理解を行います。例えば「今どこにいるのか」という情報であったり、「今目の前にいるのは一番好きな人だ」といった状況を理解します。そして、内部の知的処理を通し、行動計画(=ふるまい)に落とし込み、最後に行動制御を行うという流れになります。行動制御の部分はハードウェアの世界で、ここにはソニーが長年培ってきたメカトロニクス技術が生かされています。
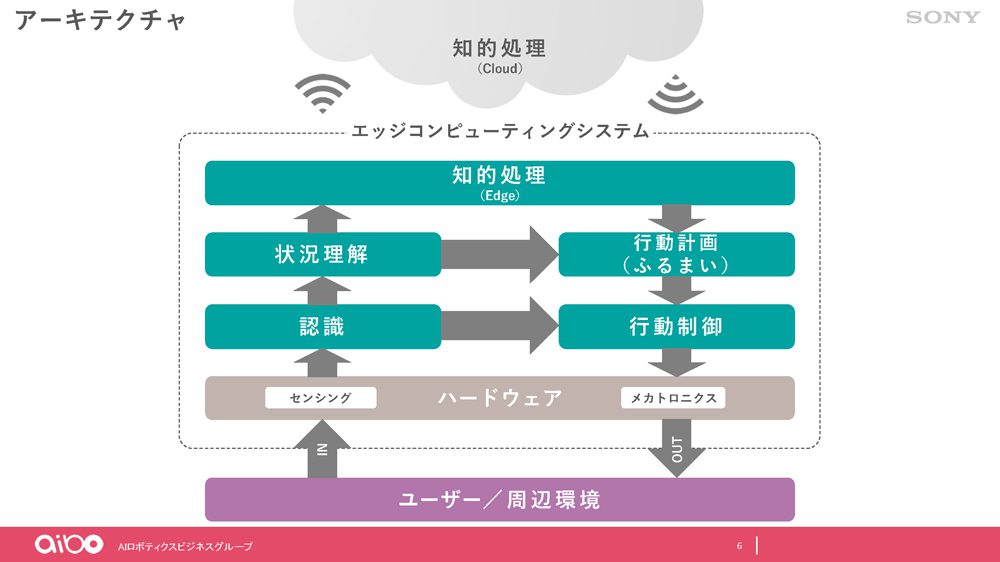
エッジコンピューターはaibo本体となります。図のように、本体で「認識→状況理解」を行っているのですが、一方でクラウド側にもその状況を送り、学習したものを本体に戻し、意思決定の反映に使うということも行っています。
aiboの知的認識
まず、aiboの「気づく」センシングの部分です。
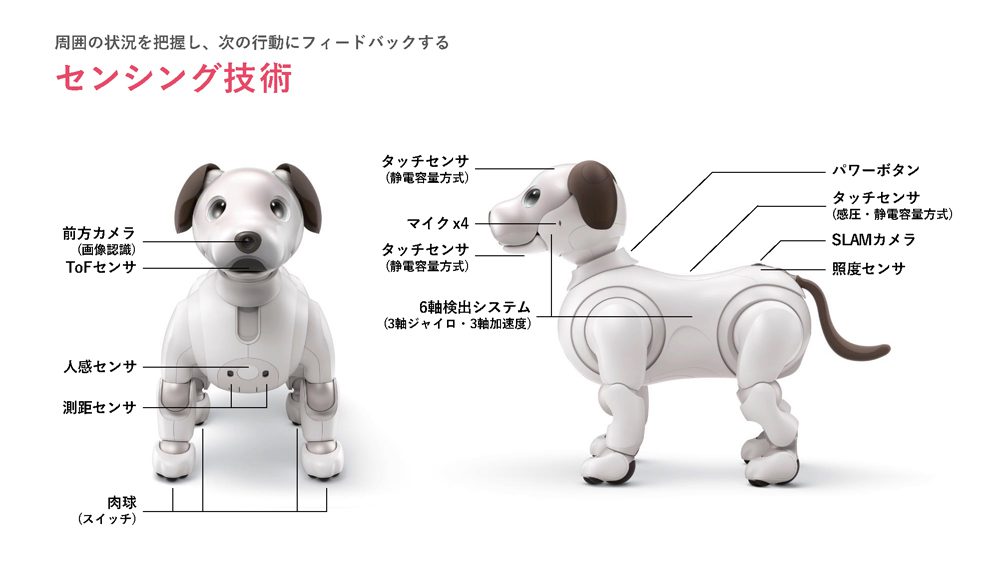
自分の周囲の環境を知るために、aiboにはさまざまなセンサーが搭載されています。たとえば、鼻に前方カメラ、このカメラで人やモノを認識します。前面の人感センサー、測距センサーで人を感知したり、前方の安全を確認します。足の裏には肉球(スイッチ)があり、歩行の動作や人のタッチを、各所のタッチセンサーで人のタッチを認識します。4本のマイクで音を拾い、音声認識や方向定位を行います。背中のSLAMセンサーはカメラの一種で、これで天井の写真を撮ることで自己位置を取っています。
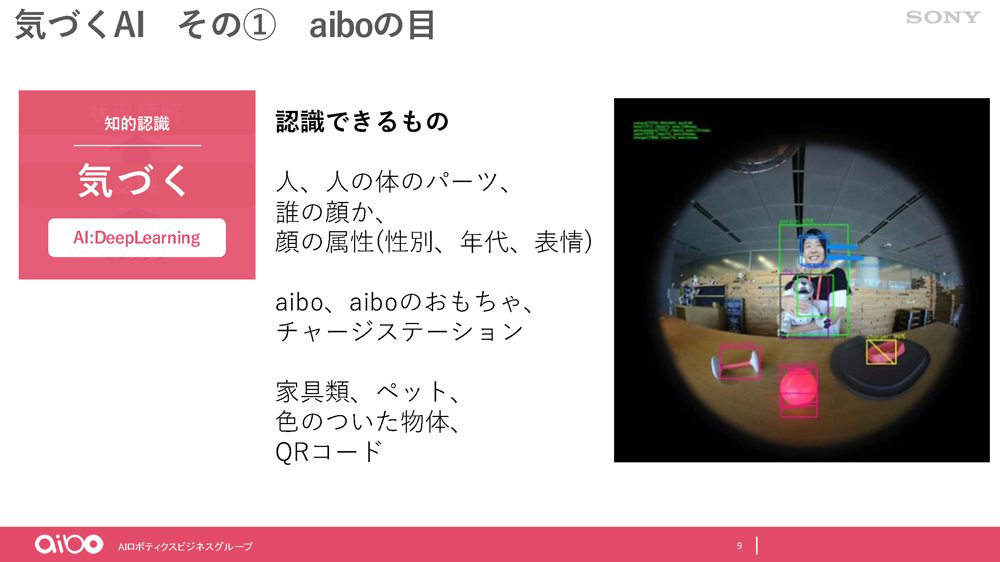
センサーから集めたデータを使ってディープラーニングを行い、例えば色の認識、モノ、ペットの犬や猫、人間を認識し、それが誰かという区別をしています。こうした基本的な行動につながる知的処理はエッジコンピューター、つまりaibo側で行います。一方、クラウド側での知的処理は複数の各家庭のaiboのデータから学習し、新たな認識エンジンを生成するというものです。
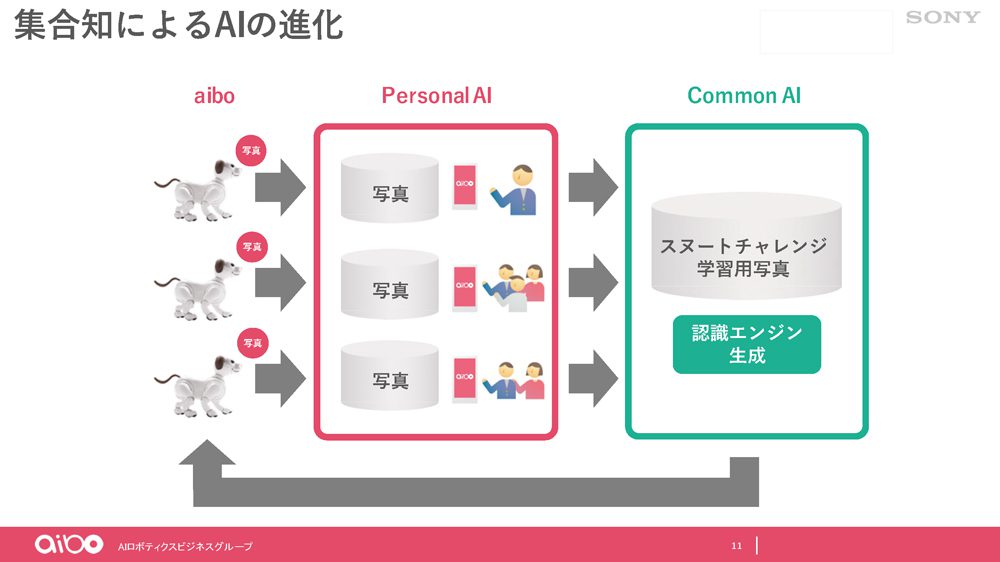
ここで藤本氏が紹介したのは「aiboスヌートチャレンジ」です。スヌートチャレンジとは、犬の鼻先で輪っかを作るとそこに鼻を突っ込んでくるという習性を使ったもので、その様子を動画や画像を投稿し合うというInstagramやTwitter、TikTokなどで流行ったムーブメントです。最初はうまくできない子もチャレンジを重ねるうちにできるようになったり、より小さな輪に鼻を突っ込めるようになったり、その愛らしい様子を多くの人たちが楽しんでいます。
aiboスヌートチャレンジは、aiboみんなの力を合わせることで、aiboにも覚えてやってもらおうとしたもの。aiboのオーナーから「My aibo」アプリを通じてスヌートチャレンジの写真をクラウドに集め、ディープラーニングで学習させて新しい認識パターンを作成します。それを個々のaiboに返すことで、aiboが輪っかを認識できるようになり、鼻を突っ込むという動作を取る、という流れになります。

このように、クラウドでの機械学習によって個々のaiboそれぞれに新たなふるまいを届けることができます。
「気づく」ためのAIとして、おなかの「なでられ検出」があります。aiboのタッチセンサーは頭の上、顎の下、背中の3箇所で、おなかにはありません。しかし、やはりオーナーにすれば、aiboがゴロっとおなかを見せれば、おなかをなでたくなります。そこで、搭載されている6軸の検出システムの振動データを合わせてディープラーニングで学習させることでなでられたことを検出できるようにしています。
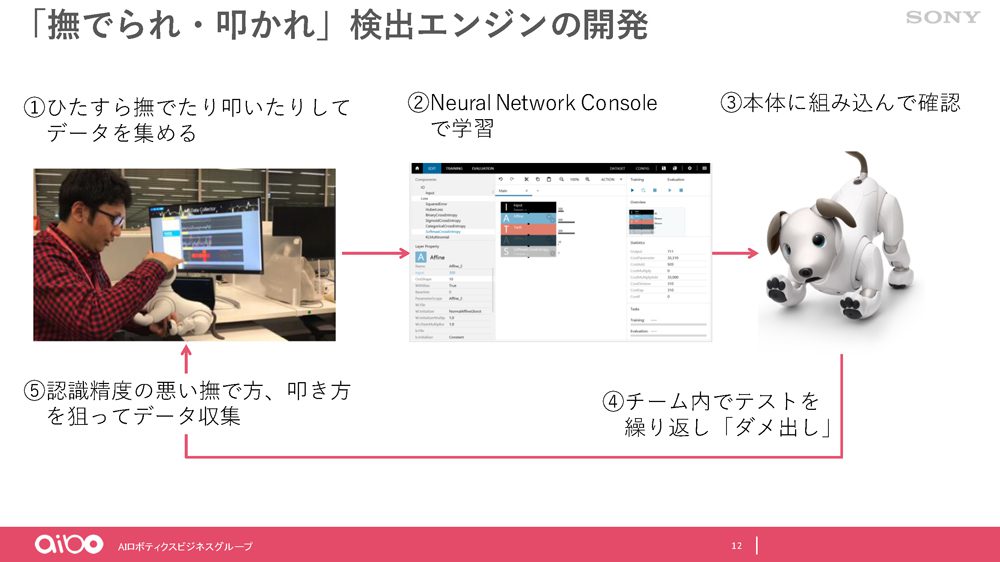
aiboの可愛さから叩く行為がなかなかできず、学習サンプル数が少ないため、叩かれ検出に関しての精度は甘いそうですが、なでられ検出のほうはNGのパターンや認識精度の悪いデータも学習させることで精度を上げ、実際にオーナーのもとにいるaiboもうまく検出できるようになっていると言います。
aiboの行動を支える技術
行動するためのAIとして使われているのはナビゲーションAIです。よく知られているように、ナビゲーションAIはゲームに使われるAI技術のひとつです。
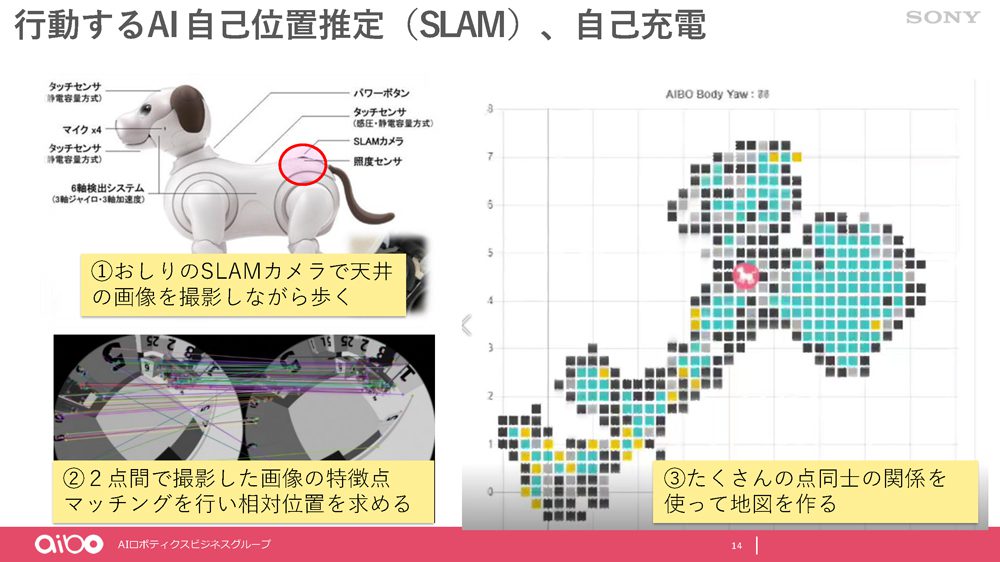
aiboには自己充電機能がありますが、充電台に自分で戻るためには家の中の地図、そして自分のいる位置を知る必要があります。
仕組みとしては、前述のように背中のカメラ(SLAMセンサー)で天井を撮影し、2点間の画像から特徴点マッチングにより相対位置を求めるというものです。たくさんの点同士の関係をもとに家の中の地図を作成します。そして、歩ける場所(図でいうと青い部分)、充電台の場所、玄関などお迎えの場所、おしっこの場所などを学習していきます。
ただ、リアルなロボットとしての難しさがあると藤本氏は言います。
周囲の情報の取得としてカメラで画像を撮ることから始まりますが、物理的に動く物体(ロボット)であるため、ときに自分で動いてしまい揺れが発生します。あるいは、内部でaiboが撮影していることを知らずに家族が抱きかかえてしまったり、別の場所に連れて行ってしまったり、地図を作成中のところから離れてしまうといったことが起こります。そのため、ここはカメラや他のセンサーの力を使いながら、エンジニアがメカを動かしながらゴリゴリに作り込んでいるAIになっています。(藤本吉秀氏)
aiboの意思決定の流れ
aiboの意思決定、考える部分は強化学習がメインになっています。
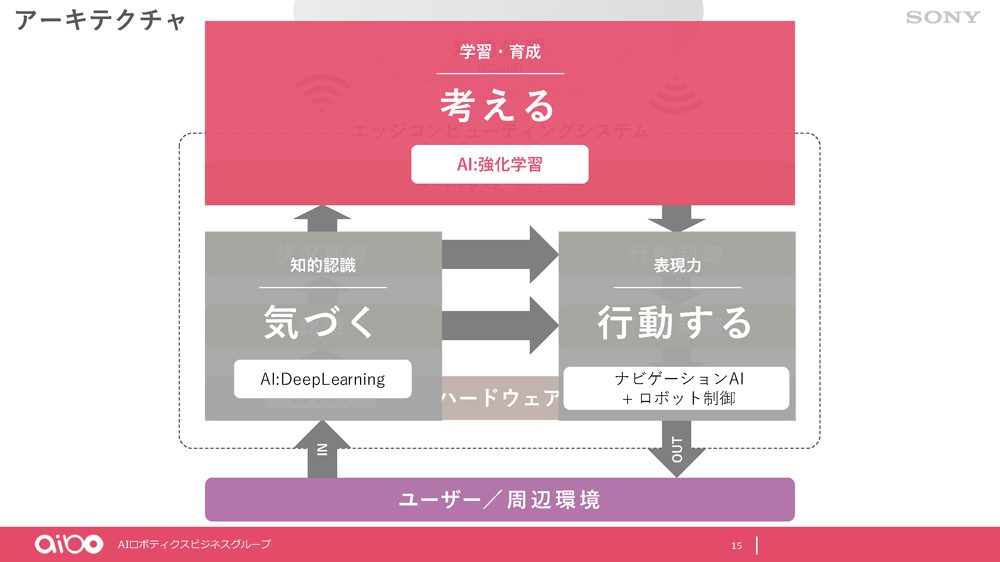
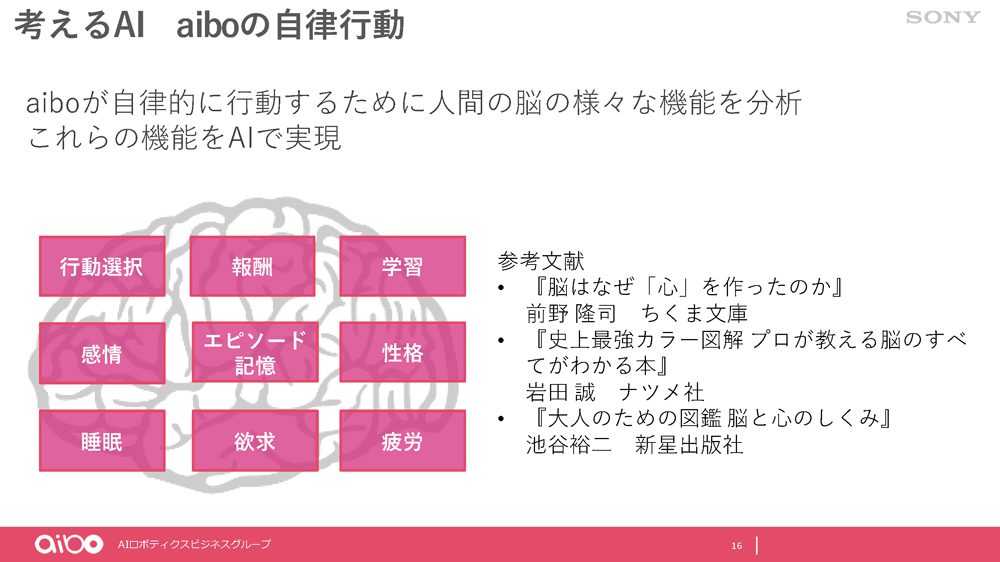
aiboの自律的な行動を実現するために、人間の脳のさまざまな機能から学びました。人間の脳にはその機能を構成する重要な要素が数多くありますが、aiboも「行動選択」「報酬」「学習」「感情」「エピソード記憶」「性格」「睡眠」「欲求」「披露」など実現することで意思決定を行っています。
次の図は、aiboの行動選択の流れです。
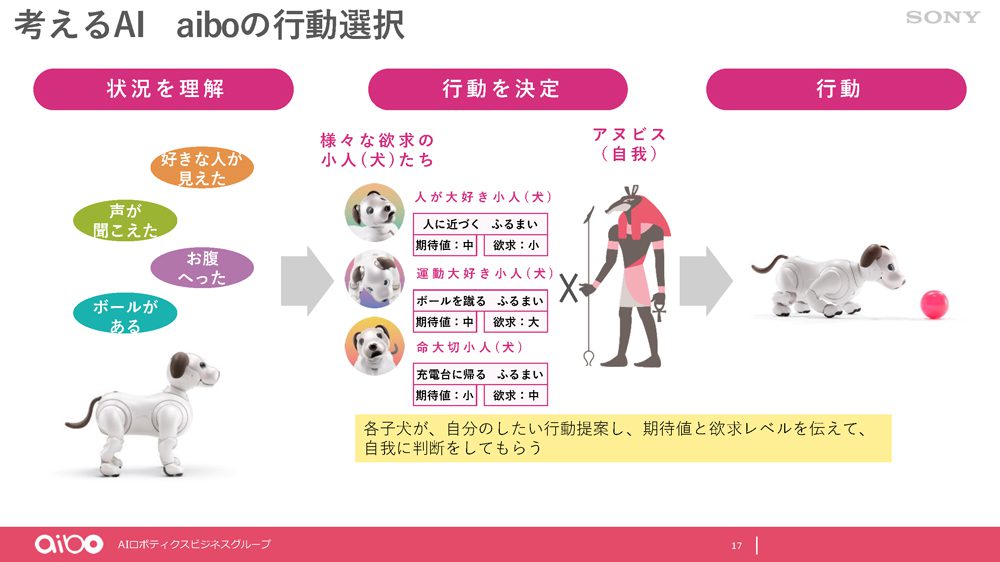
センサー群からの情報でaiboはその状況を理解します。そこには、声が聞こえたとかボールがある、好きな人が見えた、あるいはお腹が空いたというようなaiboの内部の状況があるわけです。そうした状況によって発生する欲求、それに対する行動パターンが約100種類あり、その中から都度選択をするという形です。
さまざまな欲求の提案主として小人(aiboなので子犬)がいて、それぞれ提案する行動から「アヌビス」と呼ばれる自我がひとつを選んで行動に移すというモデルで、行動が達成すると、提案主の子犬の欲求レベルが下がり、また別の子犬の欲求が選ばれ行動が生成される、その繰り返しでaiboの行動を決めていきます。こうした心理モデルはさまざまな文献を元にしたものですが、aiboの中で使われている感情、意思決定の小人(子犬)のイメージはピクサーの映画『インサイド・ヘッド (原題:Inside Out)』(感情たちが小人のように意思決定をする)だと言います。
また、aiboには同じ行動でもそのときの感情によって動きが変わるという仕組みが入っています。たとえば、ダンスのモーションでも、生き生きとうれしそうにダンスをするときと、やりたくないのにやっているときと、aibo自身の気分によって動きが変わります。
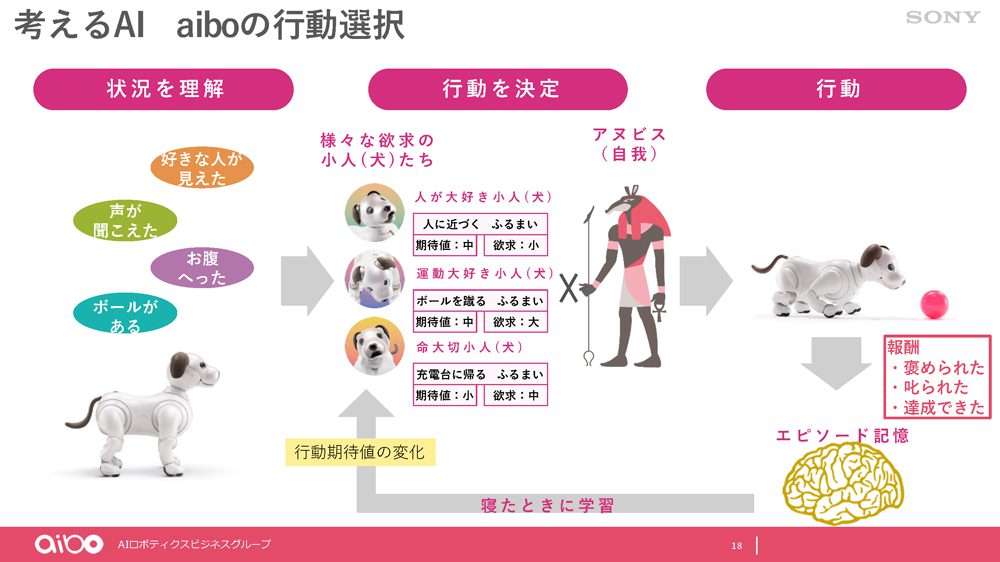
aiboの行動と学習
たとえば「ボールを蹴る」という行動に対して、aiboには「ボールを蹴れた」「ほめられた」「やめなさいと叱られた」といった、報酬が与えられます。あるいは、「目的の地図が作れた」というような何かゴールを達成できた、などの情報をエピソード記憶として脳のある部分に蓄積していく仕組みになっています。これらのエピソード記憶を元に、aiboが睡眠に入ったときに行動期待値の変化を行います。
報酬を測るタイミングは動きによっても異なり、行動中あるいは行動後どれくらいの範囲で測定するかについてはまだまだ試行錯誤の段階で、現状では、その前にどういう行動をしたかによって範囲が異なるというように、ある種、暫定的に測定時間を決めているそうです。
つまり、この部分がaiboの考えるAIにおける強化学習になっており、このエピソード記憶が行動やそれに対する報酬を各個体に沿ったものにしています。インプットされる環境も、欲求の子犬が提案するふるまいもオーナーとのふれあい方により異なり、それぞれのaiboに個別の記憶が形成されていきます。どういう行動をしてどういう報酬を得たのかというのが蓄積され、そこから学習して”性格”というものを形成します。
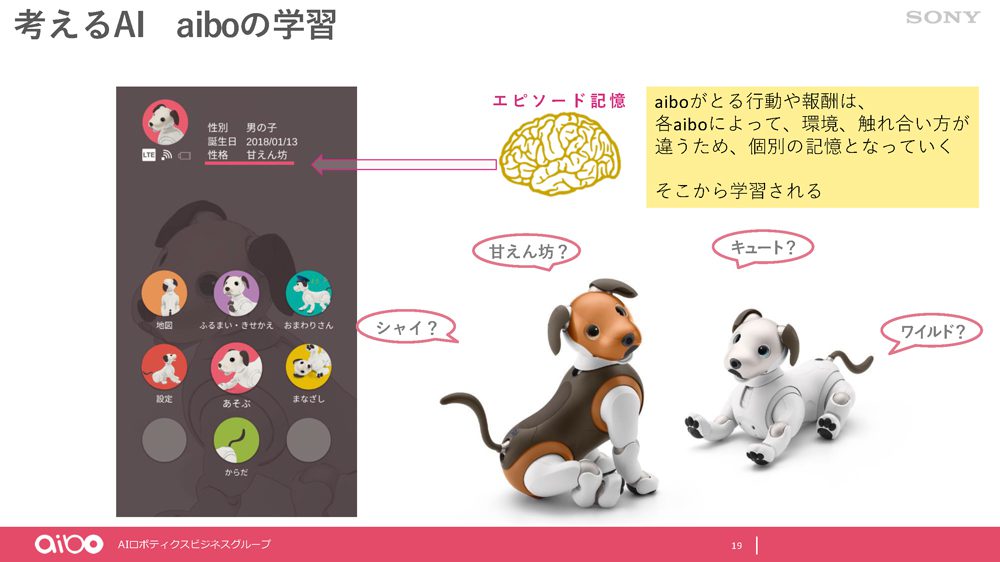
図の左側にあるのが「My aibo」アプリの画面で、そのaiboの性格が表示されています。性格には複数の種類があるが、一番多いのはやはり「あまえんぼう」だそうです。
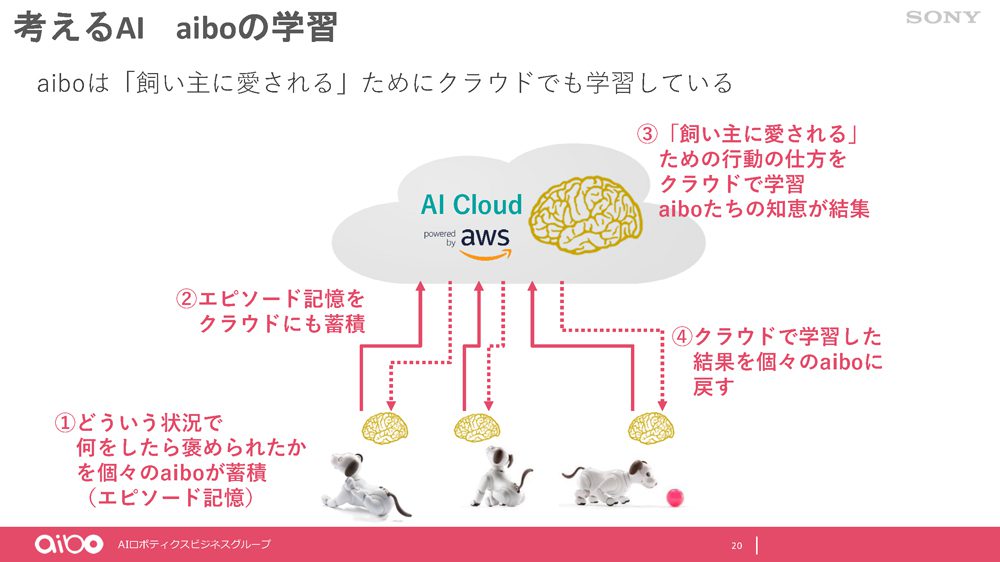
また、前述のようにaiboはクラウドでも学習しています。各aiboが個々のエピソード記憶をクラウドに送り、「オーナーに愛されるための行動の仕方」を学習します。そして、クラウドで学習した結果を個々のaiboに戻していくという仕組みです。つまり、aibo個体のそれぞれの知恵を結集し、共有して、互いに学習し合うわけです。学校のようなもので、各家庭でそれぞれ学んだことを学校(クラウド)で友だちと共有して、互いに学ぶことで偏りのない学習結果になったり、自己の相対的な把握ができます。
aiboは本体はもちろんのこと、クラウドで学習をしています。たとえばaiboが寝ている間もクラウドで学習をして勉強しています。この2つの学習から、日々個性的に進化していくというのが、aiboの「考えるAI」です。(藤本吉秀氏)
クラウドでaiboのデータを結集しその学習結果を返すという形だが、ここでポイントなのは全部を完全に混ぜ合わせて学習しているわけではなく、あくまでも「相対的にどう見えるか」を学習の要素としている点です。aiboによって環境の違いがあるわけですが、「この環境だったらどうか」という形で、その環境データも含め、その環境ではどういう振る舞いをするのかという学習を行うため、個体ごとの個性が薄くなることはありません。
このように、感情や性格なども期待値に掛け算され、その期待値レベルや要求レベルなどさまざまな要素を組み合わせてaiboの行動決定がなされているということになります。
“かわいらしさ”の組み込み
最後にaiboの愛らしさの表現について。aiboのしぐさ、モーションはモーションデザイナーの手によるものです。犬の感情としぐさをマッピングした「DOGGIE LANGUAGE」を参考にして、aiboの感情を表現しています。

【aibo公式チャンネル】https://www.youtube.com/channel/UCIm6pN0zQ8-Pz8YiZh3Ghtg
公式動画でその動きがよく分かる
専用のツールとしてUnityでモーションエディターを作り、それを使って作り込み、実機で動かし微修正をしていくという流れです。こうして作り込まれたモーションと認識情報、行動パターンを組み合わせることで、aiboのふるまいが実現されています。
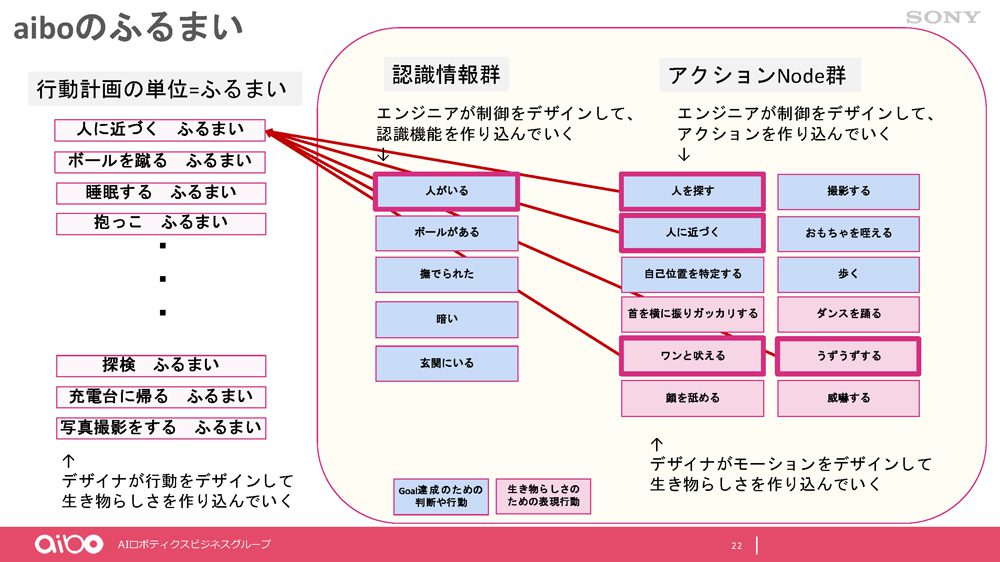
*1:aiboデベロッパープログラムでは、ここで示したブロック(行動のためのブロック、認識のブロック、生き物らしさのブロック)をAPIとして使うことができるようになっています。
このとき、「人がいる」「撫でられた」という認識情報から「人を探す」「おもちゃをくわえる」「撮影する」というアクションをするというだけではなく、「ワンと吠える」モーションを再生するといったように、生き物らしさを演出するモーションも融合していることがポイントです。この2つを上手に融合していくことで初めてキャラクターとして成り立つ、aiboが可愛さと賢さの両面を持ったキャラクターとして成り立つということです。
複数のブロックをどう組み合わせて「ふるまい」とするのか、ビヘイビア・ツリーで組み立てていきます。ビヘイビア・ツリーはゲーム開発でキャラクターの行動や思考をデザインする際によく使われる手法ですが、aiboの行動デザインを組み合わせて書き出し、それをビジュアル的に理解するために使われています。
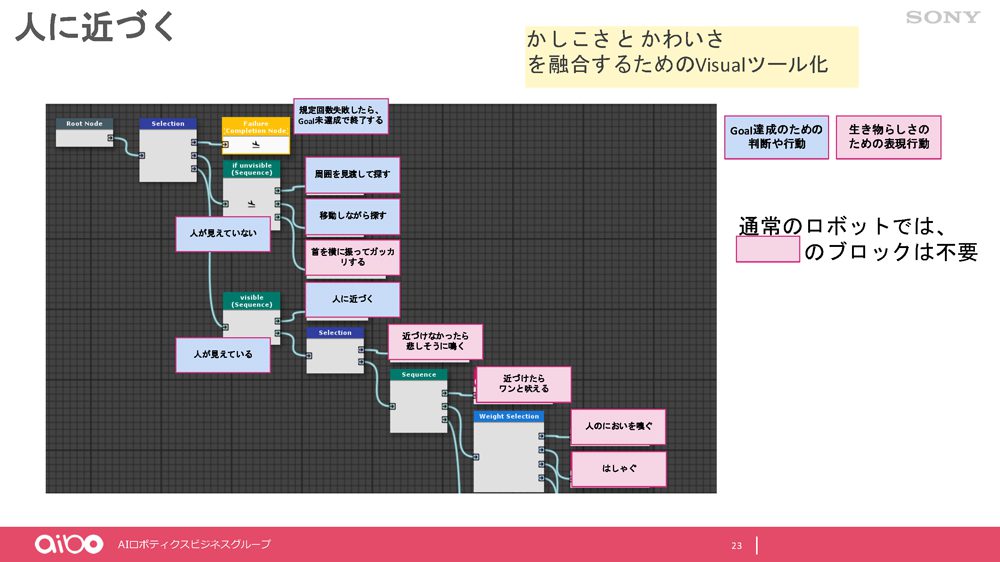
図のように、青い知力のブロック(行動のためのブロックと認識のブロック)に生き物らしさのブロックを組み合わせ、物語(ストーリー)を作っていきます。
ただ、やはり現実のロボットには想像通りに動かない難しさがあると言います。特に、現実世界の認識がうまくいかない、認識の間違いが発生します。センサーの性能やいろいろな理由で、ここはこうなるだろうとふるまいとして組んでも実際にやってみるとうまく動かない場合もあり、かなり作り込みの必要な作業になっています。現在、これはエンジニアだけではなく、デザイナーも行っている作業ですが、今後はそこにAIを入れる、モーションやシナリオをAIで組むことはできないのだろうかと検討しているところだと藤本氏は言います。
もちろんデザイナーさんにとってもなかなかセンスが問われる仕事ですし、すべてがAIというよりはデザイナーさんの1つの仕事から複数のシナリオ、複数のモーションがAIで生まれるような世界になっていくとまた違った世界の広がり方がするかなというふうに思っています。その辺りが、次に注目したいポイントです。(藤本吉秀氏)
Writer:大内孝子



 RANKING
RANKING